

Depth video spatial and temporal correlation enhancement algorithm
based on just noticeable rendering distortion model
q
Zongju Peng
a,
⇑
, Fen Chen
a
, Gangyi Jiang
a
, Mei Yu
a
, Feng Shao
a
, Yo-Song Ho
b
a
Faculty of Information Science and Engineering, Ningbo University, Ningbo 315211, China
b
School of Information and Mechatronics, Gwangju Institute of Science and Technology (GIST), Gwangju 500-712, Republic of Korea
article info
Article history:
Received 15 March 2015
Accepted 8 October 2015
Available online 22 October 2015
Keywords:
Three dimensional video system
Depth video
Just noticeable rendering distortion
Virtual view rendering
Spatial and temporal enhancement
Human visual perception
Depth video segmentation
Bit rate saving
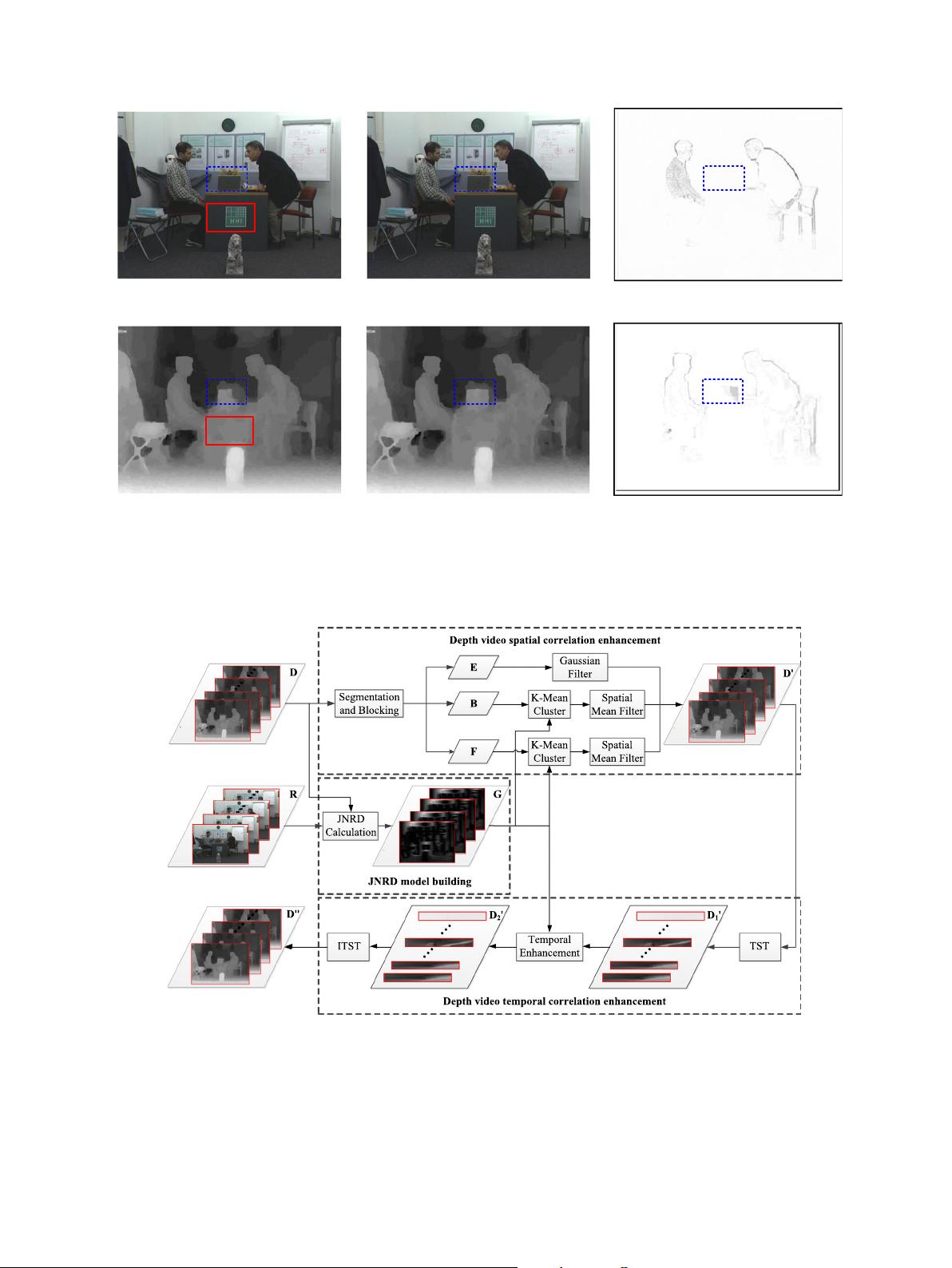
abstract
Spatial and temporal inconsistency of depth video deteriorates encoding efficiency in three dimensional
video systems. A depth video processing algorithm based on human perception is presented. Firstly, a just
noticeable rendering distortion (JNRD) model is formulated by combining the analyses of the influence of
depth distortion on virtual view rendering with human visual perception characteristics. Then, depth
video is processed based on the JNRD model from two aspects, spatial and temporal correlation enhance-
ment. During the process of spatial correlation enhancement, depth video is segmented into edge,
foreground, and background regions, and smoothened by Gaussian and mean filters. The operations of
the temporal correlation enhancement include temporal–spatial transpose (TST), temporal smoothing
filter and inverse TST. Finally, encoding and virtual view rendering experiments are conducted to
evaluate the proposed algorithm. Experimental results show that the proposed algorithm can greatly
reduce the bit rate while it maintains the quality of virtual view.
Ó 2015 Elsevier Inc. All rights reserved.
1. Introduction
With development in the areas of image and video capturing
technologies, three-dimensional (3D) display technologies and
network infrastructures, the traditional two-dimensional video
cannot satisfy the increasing demands of users. 3D video (3DV)
systems provide viewers with depth perception of the observed
scene and interactive interface. With these characteristics, 3DV
systems have a broad prospect in consumer electronic applications
such as mobile phones, games, cinema, and television [1,2]. In 3DV
system, 3D scenes can be represented by two or more videos cap-
tured by different viewpoints. However, this representation
method only provides fixed views, and users cannot continuously
switch among views. Multiview video plus depth (MVD) is a more
effective scheme of 3D scene representation, and it can be utilized
to realize 3DV systems [3]. In an MVD-based 3DV system, MVD sig-
nals are captured, compressed and transmitted to the client. The
decoded videos, along with videos of virtual views rendered by
depth image based rendering (DIBR) technique [4,5], are displayed
by 3D devices. MVD signals include multiple color videos and asso-
ciated depth videos of the same scene. Depth video is geometric
information of a scene, and denotes the distance between the
captured scene and camera. Acquisition and transmission of depth
video are two key techniques of realizing an MVD based 3DV
system.
Recently, depth video coding has become an active research
focus. The most straightforward method is to compress depth
video using most advanced encoding standard [6,7]. However,
depth video exhibits the following particular characteristics com-
pared with conventional color video: (1) depth video is mono-
chrome, (2) the texture of depth video is not as rich as that of
the corresponding color video and (3) depth video is not used for
display, but rather for virtual view rendering. Many related tech-
nologies were proposed for depth video/map encoding [8–20].
Platelet-based [8], silhouette-based [9], enhanced context-based
adaptive binary arithmetic [10], and object-based coding algo-
rithms [11] were proposed for improving encoding performance.
Liu et al. presented two depth compression techniques: trilateral
filter and sparse dyadic mode [12]. Kang et al. designed an adaptive
geometry-based intra prediction scheme for depth video coding
[13]. Oh et al. proposed a depth boundary reconstruction filter to
code depth video [14]. Spatial down sampling and temporal sub-
sampling approaches are utilized to improve compression ratio
[15,16]. Bosc et al. investigated factors which impact on the best
bit rate ratio between depth and color video [17]. Zhang et al.
proposed regional bit allocation and rate distortion optimization
http://dx.doi.org/10.1016/j.jvcir.2015.10.003
1047-3203/Ó 2015 Elsevier Inc. All rights reserved.
q
This paper has been recommended for acceptance by Yehoshua Zeevi.
⇑
Corresponding author. Fax: +86 057487600582.
E-mail address: pengzongju@nbu.edu.cn (Z. Peng).
J. Vis. Commun. Image R. 33 (2015) 309–322
Contents lists available at ScienceDirect
J. Vis. Commun. Image R.
journal homepage: www.elsevier.com/locate/jvci

剩余13页未读,继续阅读
资源评论


weixin_38547532
- 粉丝: 5
- 资源: 962









最新资源
- 光伏双轴跟踪器sw21可编辑全套技术资料100%好用.zip
- 仓储管理系统WMS-NO2020v1:新一代智能仓储管理系统的特性和应用场景
- 国产LED灯珠自动加工生产线设计sw17可编辑全套技术资料100%好用.zip
- 【空气涡轮发动机Matlab simulink动态仿真模型】 1、部件级模型;进气道,涡轮,气室,压气机,尾喷管,转子动力学模块,容积模块 2、PID控制器: 输出扭矩阶跃扰动下,维持转速恒定
- 激光平地机(sw16可编辑+cad+说明书)全套技术资料100%好用.zip
- 2023年中国智能仓储市场调研报告:解析仓储自动化、资产管理及环境监控的智能化升级路径
- 数据驱动的多离散场景电热综合能源系统分布鲁棒优化算法 关键词:场景聚类 分布式鲁棒优化 数据驱动的分布鲁棒优化 CCG算法 拉丁立方抽样 kmeans 参考文档: 1基于场景聚类的主动配
- FPGA XDMA PCIE3.0视频采集卡工程 FPGA XDMA 中断模式实现 PCIE3.0 视频采集 OV5640摄像头 提供2套工程源码和QT上位机源码
- VSG-MMC,同步机控制的MMC逆变器,受端流站 原创MMC逆变器,使用NLM最近电平逼近调制方法,有20个子模块,DC40KV-AC20KV-10MVA,环流抑制,快速排序,单电流环,matla
- 混流式水泵水轮机sw14可编辑全套技术资料100%好用.zip
- 【基于GasTurb的不同构型发动机性能对比】 GasTurb软件 1、涡桨、涡扇发动机等构型 2、在一样的推力需求下对比NOx排放差异 3、在不同的delta-T和高度下对比性能差异
- T-Mats库 涡扇发动机气路故障 数据 仿真模型 1、包含部件流量、效率及压比故障在内的13类故障植入,故障程序和组合可自定义;航空发动机,典型气路故障仿真; 2、基于软阈值去噪处理后的信号序列提
- 电导增量法INC仿真模型,作为目前实际光伏发电系统中最常用的mppt算法,可以用于学习研究,才用了输出参考电压的方式来进行pwm调制
- 有限元comsol电力电缆套管有限元电场数值计算模型,可以得到内部电场和电势的分 comsol相变模型,仿真 ,ansys有限元分析 -通过焓法耦合温度场和流体场,得到材料整个随温度变化的相变过程
- 三相三电平SVPWM矢量控制调制方式以及实现方法
- 胶框自动涂胶机ProE全套技术资料100%好用.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


