
第
21
卷第
2
期
2007
年
3
月
湖南工业大学学报
Journal
of
Hunan
University of Technology
单级倒主摆系统控制方法设计
彭自然,罗大庸,张航
(中南大学信息科学与工程学院,湖南长沙
410083
)
Vo
1.
21
No.2
M
缸.
2007
摘
要:倒立摆系统以其自身的不稳定性为系统的平衡提出了难题,也因此成为自动控制实验中验证控制算法
优劣的极好的实验装直。通过比较分析遗传算法与自适应神经模糊推理系统两种不同方法在倒立摆控制系统中的应
用,并实验证实:使用基于
ANFIS
倒立摆系统计算量小,收敛快,但是其鲁棒性却不如基于遗传算法所设计的控
制其好;遗传算法求解问题的效率高,且随着问题规模的扩大,优势更为突出。
关键词:遗传算法;自适应神经模糊推理系统;控制系统
中图分类号:
0175
文献标识码
:A
文章编号
1673-9833(2007)02-0053-05
Design
and
Realization of Single Inverted-Pendulum
Control
System
Peng Ziran, Lou Dayong, Zhang Hang
(
College
of
Information
Science
and
Engineering ,
Central
South
University ,
Changsha
410083
, China)
、
Abstract:
Inverted-pendulum system is difficult to control because
of
its
in~tability.
Aiming at the control strategy in
automatic control experiments
, it approves that on the basis
of
ANFIS , the single inverted-pendulum control shows the
algorithm is veracious and its convergence is faster than other one which based on genetic algorithm between the different
methods through the analyses. Genetic algorithm has a better efficiency and has more superiority in scale expanding.
Key words: genetic algorithm; ANFIS; control system
。
前言
单级倒立摆是一种典型的多变量、非线性、强精
合的不稳定系统,对它的研究可归结为对多变量非
线性系统的研究,具有一定的理论价值
[IJ
。从工程应
用上讲,卫星的姿态控制、机器人的关节运动控制
和起重机械的稳钩装置等都和倒立摆模型有相似之
处[气所以,对倒立摆系统的控制研究具有重要的工
程背景和实际意义。
在某机械臂的设计过程中,将机械臂当作→个倒
立摆来分析。通过比较两种方法在倒立摆控制系统中
的应用,得出了最适用于本系统的一种方法。
收稿日期:
2007-01-25
1
倒立摆控制系统的数学模型
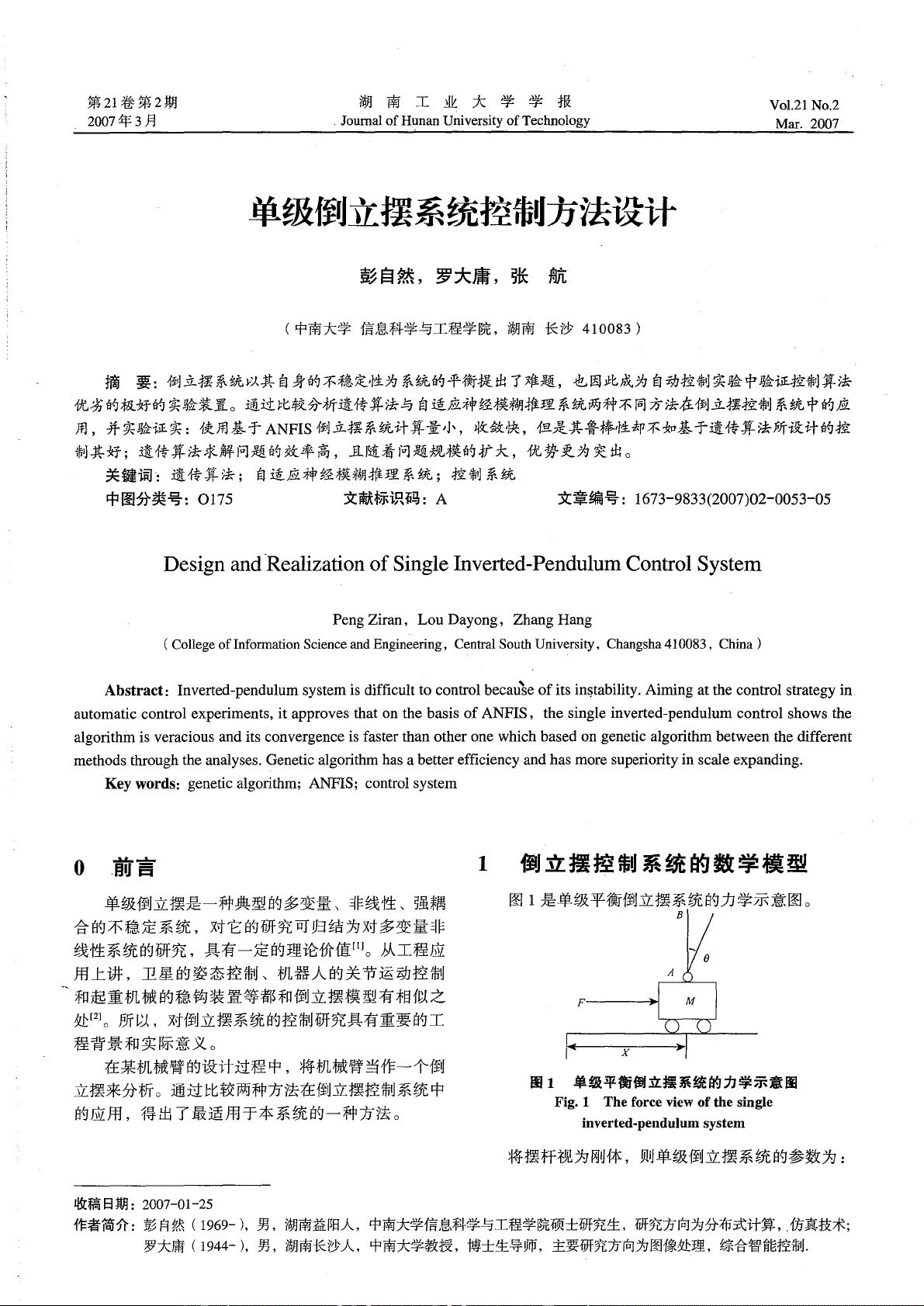
图
1
是单级平衡倒立摆系统的力学示意图。
B
F
X
图
1
单级平衡倒立摆系统的力学示意固
Fig. 1 The force
view
of the single
inverted-pendulum system
将摆杆视为刚体,则单级倒立摆系统的参数为:
作者简介:彭自然(
1969-
),男,湖南益阳人,中南大学信息科学与工程学院硕士研究生,研究方向为分布式计算,仿真技术;
罗大庸(
1944
斗,男,湖南长沙人,中南大学教授,博士生导师,主要研究方向为图像处理,综合智能控制.
资源评论


weixin_38532139
- 粉丝: 5
- 资源: 910









最新资源
- 自定义车位数及等候区停车场管理系统C语言源码
- MCGS昆仑通态液位PID控制仿真视频,可以单独进行手自动控制,模拟现场设备运行情况,模拟液位、温度、压力
- Qt 基于QAbstractTableModel自定义TableModel
- CITI考试资料与选择题答案
- 基于永磁同步电机(pmsm)的扩展卡尔曼转速和转子位置估计,本人已将效果调制很好,可准确估计pmsm的转速和转子位置
- 卡密社区SUP系统总控源码+主站分销系统功能源码
- MMC储能,模块化多电平变器储能,MMC-PCS,MMC-BESS,储能,SOC均衡控制,蓄电池充放电控制,mmc,储能变器,
- 2025考研22408全科全年PDF(政治+英语二+数学二+408+答题卡).zip
- 两电平逆变器vsr并网simulink仿真模型 模型由逆变器?lcl滤波器?电网?负载构成,系统额定功率为50Kw,该模型可以用于光伏或风电等的并网控制部分 逆变器采用pi双闭环控制,坐标变,dq
- Cruise双电机四轮驱动模型和单电机前驱模型,分层建模,具有控制策略模型,三种联合仿真方式都可以运行,以及sp资料
- 30套2025年横版日历excel表
- 全球摩托车市场发展前景分析报告:预计至2031年年复合增长率(CAGR)为1.4%(2025-2031)
- 三段式电流保护仿真 Simulink仿真
- 基于java的财务管理系统设计与实现.docx
- 基于java的藏区特产销售平台设计与实现.docx
- 基于java的毕业生信息招聘平台设计与实现.docx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


