
第
31
卷第
8
期
振动与冲击
JOURNAL
OF
VIBRATION
AND
SHOCK
Vo
l.
31
No.8
2012
一种新型并联
XYY
微定位平台动力学建模及控制仿真
舒强
I
气施宁平饶学军郭友明
1
,
2
(1.中国科学院光电技术研究所,成都
6102092.
中科院研究生院,北京
100049)
摘
要:介绍一种新型的压电陶器驱动的并联
XYY
结构微定位平台。该平台通过
Y
方向两个压电驱动器的实时
校正,能够避免因加工装配误差引起的结构非对称性对平台运动直线度的影响。推导微定位平台的动力学模型。通过引
入过程噪声的数学模型增广
LQG
控制器,实现微定位平台解搞和跟踪,仿真发现这种方法能够有效抑制窄带随机扰动,
提高定位精度。
关键询:微定位;并联;
LQG;
窄带扰动;噪声抑制
中图分类号
THl12
文献标识码
A
Dynamic
modeling
and
control
simulation
for
a
novel
parallel
XVY
micro
positioner
SHU Qiang
1
,2 , SHI
1飞
Ting-ping
1
,
RAO
Xue-jun
1
,
GUO
You-ming
1
,2
(1.
Inst
Ît
ute
of
Optics
and
Electronics
the
Chinese
Academy
of
Science ,
Chengdu
610209
, China;
2.
Graduate
University
of
Chinese
Acadamy
of
Science
,
Beijing
100049
, China)
Abstract:
A novel micro positioner based on piezo-electric actuators was designed. With compensation of two
piezo-electric actuators fixed along Y direction
,
bad
influence of manufacturing
and
assembling error on the displacement
straightness of the positioner was greatly
reduced.
Dynamic model of
the
positioner was developed. A control strategy
based
on
LQG
(linear
quadratic
Gaussian)
controller augmented by model of noise from base structure was studied.
Computer simulation indicated that the motion of the positioner is decoupled
and
the positioner
can
track reference
input
well
and
work well with narrow-band stochastic interference from base structure greatly depressed.
Key
words:
micro positioning;
parallel;
LQG; narrow band interference; noise depression
国内外学者对基于压电陶瓷驱动的微定位平台作
了广泛研究。从结构上,主要分为串联和并联两种类
型。由于加工和装配误差产生的不对称性,串联结构
的微定位平台运动并不能保证严格的直线性。在光纤
焊接,光刻掩膜对准等应用中,对运动直线度的要求非
常高,采用串联结构的微定位平台难以保证运动的直
线性
[lJ
O
而并联结构的微定位平台,所有的驱动器同
时作用在动平台上,因而能够校正运动偏差,有效提高
运动精度。然而,并联结构的微定位平台的各自由度
上存在运动搞合,其控制要比串联结构复杂,采用单一
的
PI
控制技术难以奏效。
LQG
控制是现代控制理论
和最优控制技术发展过程中的重要成果,尤其适合多
输入多输出的控制对象,在航空航天领域,飞行器控
制,过程控制和社会学等领域都有很多成功的应用
案例
[2
-3
丁。
在很多应用场合,外界振动降低了微定位平台的
定位精度。在激光长距通信技术中,地基极其轻微的
收稿
11
月1:
2011
-
06
-
20
修改稿收到
11
W
l:2
0
门
09
-27
第-作者衍弛
i
刃,硕I:
~I
二,
1986
"1'
8 n
él
振动者
F
有可能导致激光束产生偏转
[4]
。为了减小地基
振动的影响,通常采用的方法是隔离振源,提高结构的
固有频率,或者采用更昂贵复杂的主动控制技术。这
些方法通常需要提高部件的强度导致质量变大或者额
外的设备,在某些应用场合受到限制。本文在
LQG
控
制基础上引人噪声模型,通过仿真发现能够很好的抑
制确定频率分布的窄带随机扰动。首先介绍了新型
XYY
并联微动台,推导了平台的动力学方程。然后通
过仿真分析确定出
LQG
控制权矩阵,分析了过程噪声
协方差对扰动押制能力的影响规律。仿真结果表明,
采用噪声模型增广的
LQG
控制要比直接使用
LQG
控
制具有更好的噪声抑制能力。
1
机械结构介绍
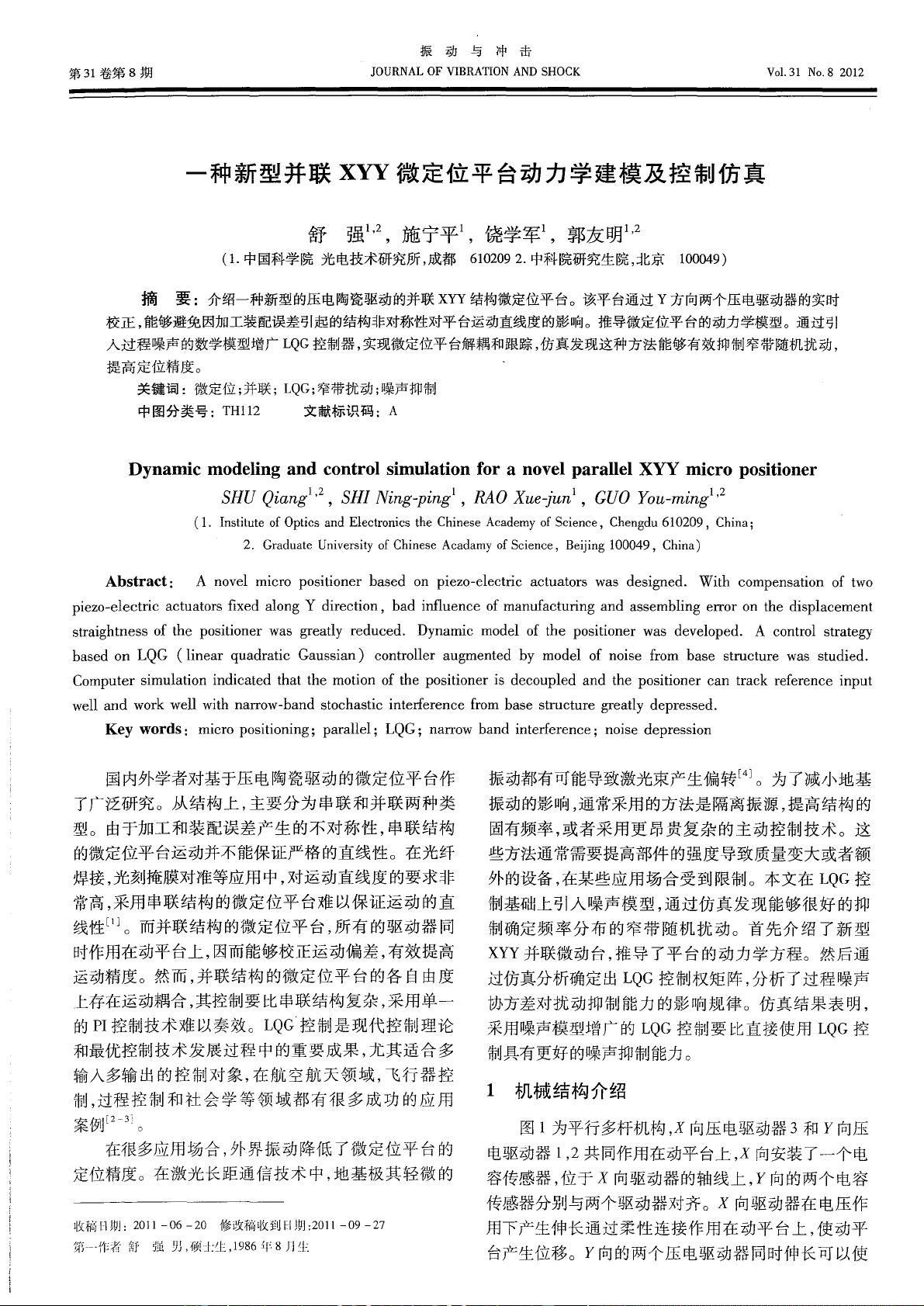
图
1
为平行多杆机构
,
X
向压电驱动器
3
和
Y
向压
电驱动器
1
,
2
共同作用在动平台土
,
X
向安装了一个电
容传感器,位于
X
向驱动器的轴线上
,
Y
向的两个电容
传感器分别与两个驱动器对齐。
X
向驱动器在电压作
用下产生伸长通过柔性连接作用在动平台上,使动平
台产生位移。
Y
向的两个压电驱动器同时伸长可以使
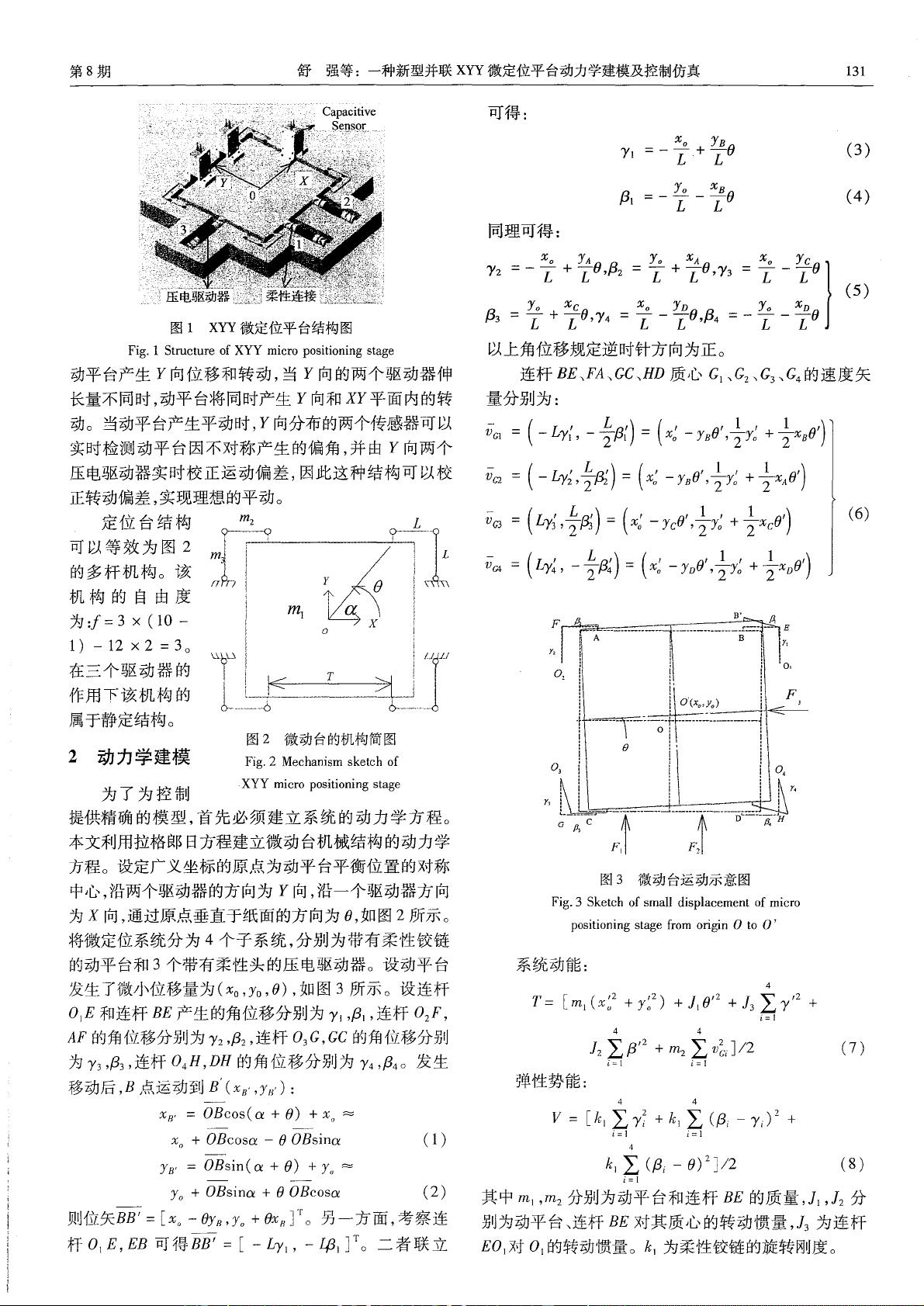
剩余6页未读,继续阅读
资源评论


weixin_38530211
- 粉丝: 1
- 资源: 970









最新资源
- 【无人机】四旋翼飞行器目标分配、全局路径规划和局部路径规划附Matlab代码.rar
- 【无人机三维路径规划】基于PSO无人机路径规划3D城市附Matlab代码.rar
- 【无人机路径规划】粒子群优化和遗传算法实现有效的水陆两栖无人机任务规划和执行Matlab实现.rar
- 基于mediapipe和KNN分类算法的健身计数器引体向上-深蹲-俯卧撑计数器源码+项目文档说明.zip
- 【无人机路径规划】用于无人机路径规划的多目标 PSO实现Matlab代码.rar
- 【无线传感器】基于 Mamdani 模糊推理系统改进无线传感器网络路由和数据包传递附Matlab代码.rar
- 【物理应用】基于Matlab计算并绘制一维量子和经典谐振子的波函数和概率分布.rar
- 【物理应用】使用提升算子计算量子谐振子的激发态研究附Matlab代码.rar
- 【物理】弹簧-质量-阻尼器系统行为分析附Matlab代码.rar
- 【物理应用】基于Zernike 多项式在圆形、六边形、椭圆形、矩形或环形瞳孔上应用Matlab代码实现.rar
- 【物理应用】基于物理场的动态模式分解(piDMD)研究附Matlab代码.rar
- 【信号处理】天线分集与空时编码技术——空时格码matlab代码.rar
- 【信道估计】基于鲸鱼优化算法的5G信道估计Matlab代码.rar
- 【物流选址】基于免疫优化算法的物流配送中心选址规划研究Matlab实现.rar
- proteus图,重庆邮电大学,单片机实验
- 【信号去噪】基于马氏距离和EDF统计IEE-TSP小波的多元信号去噪方法研究附Matlab代码.rar
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


