
工程师需要了解的知识:控制系统的稳定性标准工程师需要了解的知识:控制系统的稳定性标准
本文为读者详细介绍了作为一名工程师需要了解的控制系统的稳定性标准的基础知识
在电子领域,振荡器是一种能够产生自激正弦信号的电路。在多种多样的配置中,振荡器的加速过程牵涉到采用振荡器的电子
电路固有的噪声。上电时噪声等级上升,此时开始振荡及自激。此类电路可采用图1所示的构成模块组成。如您所视,此配置
看上去非常接近于我们控制系统的配置。
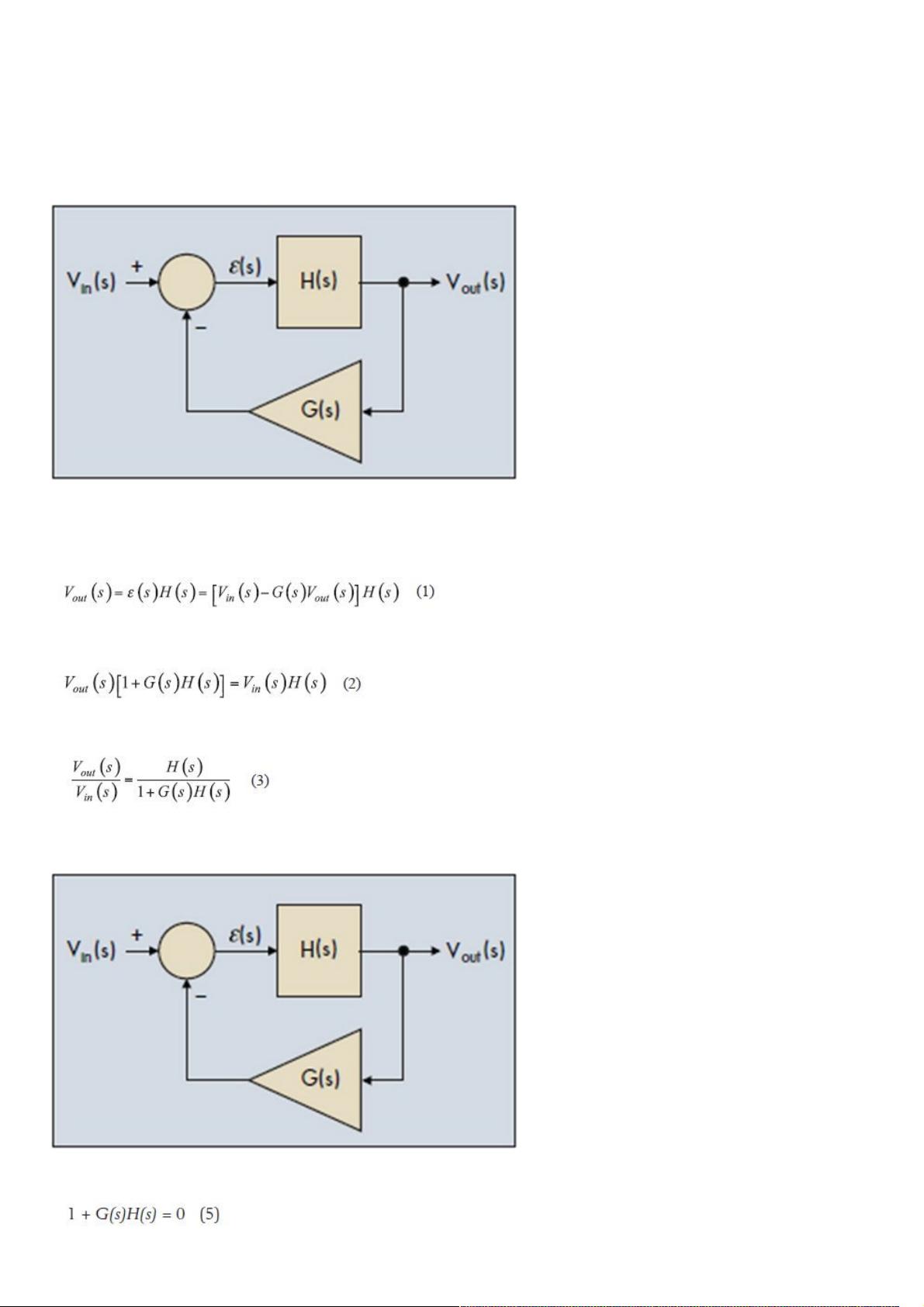
图1:振荡器实质上是一种误差信号,不会妨碍输出信号变化的控制系统。
在我们的示例中,励磁输入并非噪声,而是电压电平Vin,它被注入为输入变量以启动振荡器。直接通道由传递函数H(s)构
成,而返回通道包含G(s)区块。要分析此系统,我们首先通过输出电压与输入变量的变化关系方程式来写出其传递函数:
如果我们扩充此公式及Vout(s)项,我们就得到
故此类系统的传递函数就是:
在此方程式中,乘积G(s)H(s)称作环路增益,其标记为T(s)。要将我们的系统转换为自激振荡器,则必须存在输出信号,即使
输入信号已消失。为了满足这样的目标,就必须符合下列条件:
要在Vin消失条件下验证此方程式,商数(quotient)就必须无限大。商数无限大的条件就是特征方程式D(s)等于0:
要满足此条件,G(s)H(s)必须等于-1。换句话说,环路增益的大小就必须为1,其符号应当改为负号。正弦信号的符号改变只
资源评论


weixin_38499349
- 粉丝: 2
- 资源: 961









最新资源
- 按键映射.apk电视盒子软件
- oauth2-shiro与Redis的整合,更符合实际项目需要.zip
- 对datax进行了插件扩展-以支持对http接口数据的采集-jsonreader-v1.1.1.zip
- Power Off Click电视盒子软件
- node.js 和 redis 中的实时图像板.zip
- noise of polyphase electric motors(多相电机噪声)
- NewRelic 的 redis 工具.zip
- Spring 框架搭建 java 项目所需 jar 包
- 基于DeepSORT算法实现端到端的行人多目标跟踪+python源码+文档说明(高分作品)
- IDM下载器试用工具,一键运行
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


