

A Gentle Introduction to Predictive Filters
Siome Klein Goldenstein
1
Abstract: Predictive filters are essential tools in modern science. They perform
state prediction and parameter estimation in fields such as robotics, computer vi-
sion, and computer graphics. Sometimes also called Bayesian filters, they apply the
Bayesian rule of conditional probability to combine a predicted behavior with some
corrupted indirect observation.
When we study and solve a problem, we first need its proper mathematical formula-
tion. Finding the essential parameters that best describe the system is hard, modeling
their behaviors over time is even more challenging. Usually, we also have an in-
spection mechanism, that provides us indirect measurements, the observations, of the
hidden underlying parameters. We also need to deal with the concept of uncertainty,
and use random variables to represent both the state and the observations.
Predictive filters are a family of estimation techniques. They combine the system’s
dynamics uncertain prediction and the corrupted observation. There are many differ-
ent predictive filters, each dealing with different types of mathematical representations
for random variables and system dynamics.
Here, the reader will find a dense introduction to predictive filters. After a general in-
troduction, we have a brief discussion about mathematical modeling of systems: state
representation, dynamics, and observation. Then, we expose some basic issues related
with random variables and uncertainty modeling, and discuss four implementations
of predictive filters, in order of complexity: the Kalman filter, the extended Kalman
filter, the particle filter, and the unscented Kalman filter.
1 Introduction
In applied sciences, we use mathematical models to describe, understand, and deal
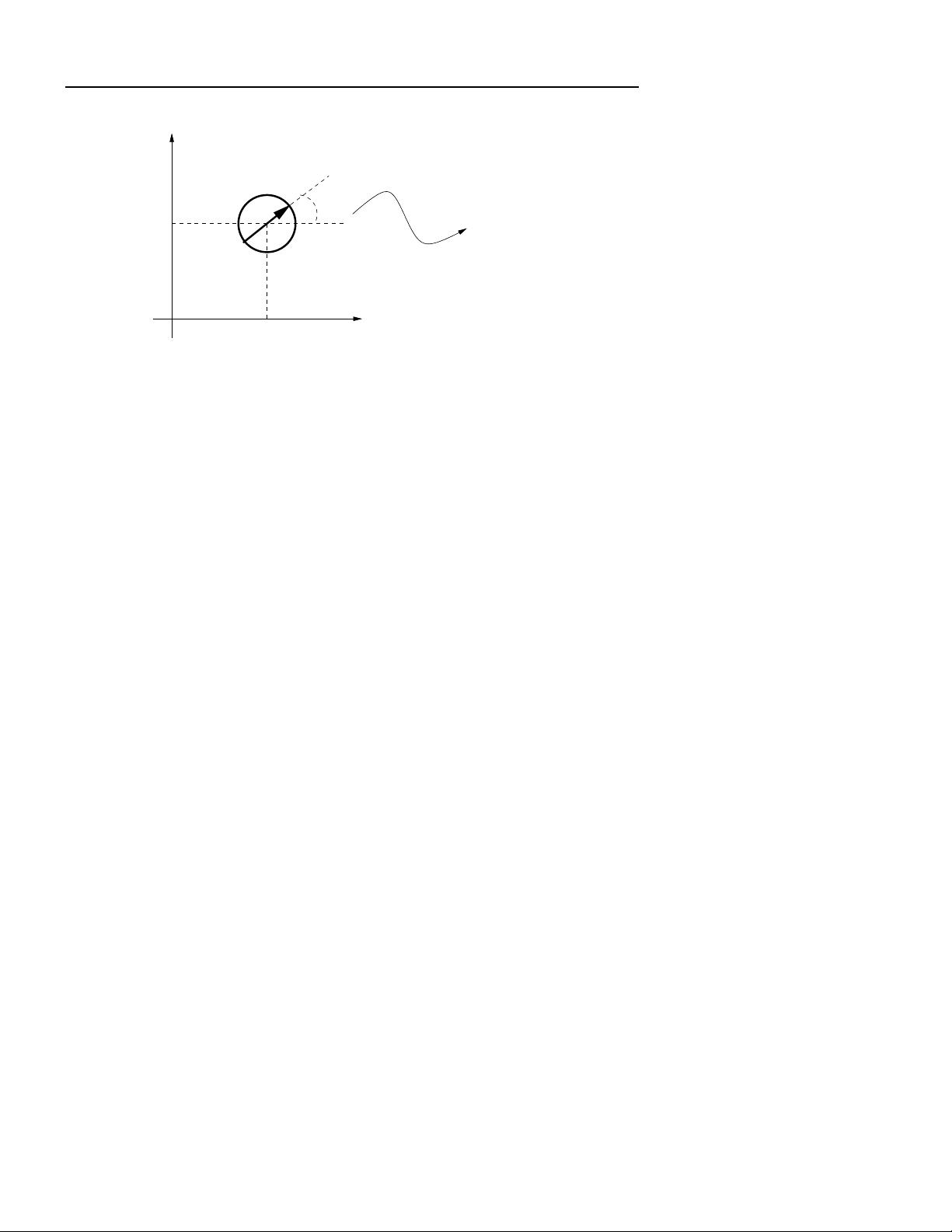
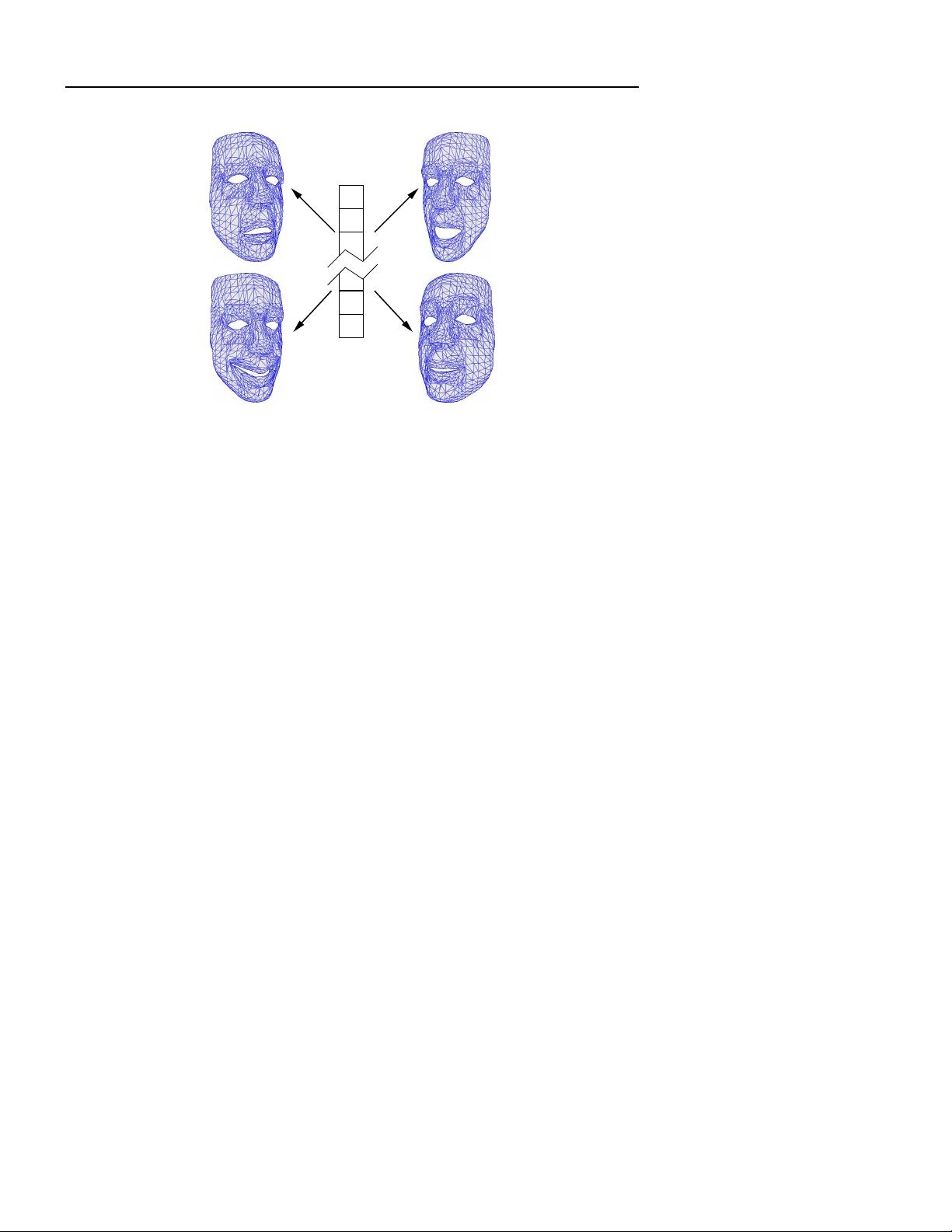
with real objects. Applications are varied, and may involve guiding a mobile exploratory
vehicle, understanding a human face and its expressions, or controlling a nuclear power plant
reactor. A good mathematical representation lets us infer properties of the real entity, and
understand beforehand the possible implications of our interactions with it.
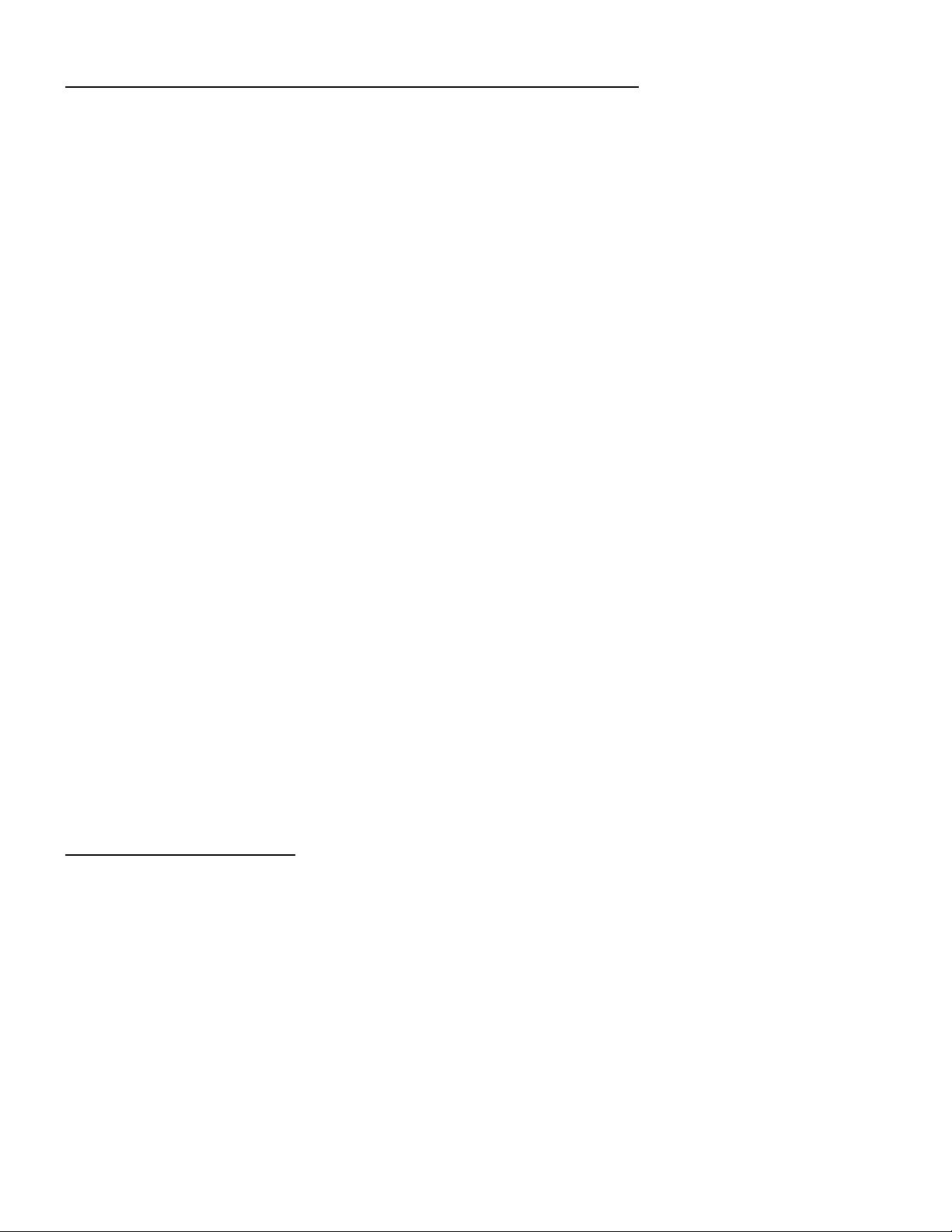
The state vector of a model is the set of parameters that uniquely describe a config-
uration of the object. The set of parameters that model an object is usually not unique, and
each situation leads to a different set of design choices. When the object’s parameters are not
1
Instituto de Computação, UNICAMP
Caixa Postal 6176, Campinas - SP, 13084-971 Brazil
siome@ic.unicamp.br

剩余28页未读,继续阅读
资源评论


chi_mian
- 粉丝: 10
- 资源: 5









最新资源
- 高校毕业生就业信息-JAVA-基于springboot的高校毕业生就业信息管理系统(毕业论文)
- node-red-contrib-opcua-test.json
- 高校社团管理-JAVA-基于springBoot的高校社团管理系统的设计与实现(毕业论文)
- 基于pytorch实现的ghostnetv1、v2、v3对10种鸟类图像识别【完整代码+数据集】
- 医疗设备管理-JAVA-基于springboot的医疗设备管理系统设计与实现(毕业论文)
- 基于AT89C52单片机的6位电子密码锁设计-14.zip
- 解决用STM32CubeMX配置FreeRTOS时头文件丢失问题
- 古城景区-JAVA-基于Spring Boot的古城景区管理系统的设计与实现(毕业论文)
- 2024全国大学生软件测试大赛Web赛项-省赛真题
- 商用密码,我国商用密码行业发展介绍
- 交通旅游订票-JAVA-基于spring boot的交通旅游订票系统设计与实现(毕业论文)
- 商用密码法律法规及标准体系解读V1.8-240827
- 流浪动物救助-JAVA-基于spring boot的流浪动物救助系统的设计与实现(毕业论文)
- Hadoop与Spark集群搭建及中文字频统计与Titanic数据分类实战
- 中国飞行器设计大赛圆筒权重文件
- 学生成绩管理-JAVA-基于spring boot的软件学院学生成绩管理系统的设计与实现(毕业论文)
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


