第四章 线性系统的能控性和能观性1

需积分: 0 177 浏览量
更新于2022-08-08
收藏 918KB DOCX 举报
线性系统的能控性和能观性是控制理论中的核心概念,它们对于系统设计、分析和优化具有重要意义。在本章中,我们将深入探讨这两个概念及其在实际应用中的作用。
我们来理解“能控性”(Controllability)。能控性是指一个系统能否通过其输入信号在有限时间内将系统状态转移到任意期望的状态。换句话说,如果系统能从任何初始状态通过控制输入到达任何目标状态,那么该系统就是能控的。在线性系统理论中,能控性的判据通常是卡尔曼能控性矩阵(Kalman Controllability Matrix)的秩。如果该矩阵的秩等于系统的状态变量数目,那么系统是能控的。此外,还有其他的能控性判据,如能控性指数、能控李雅普诺夫函数等。
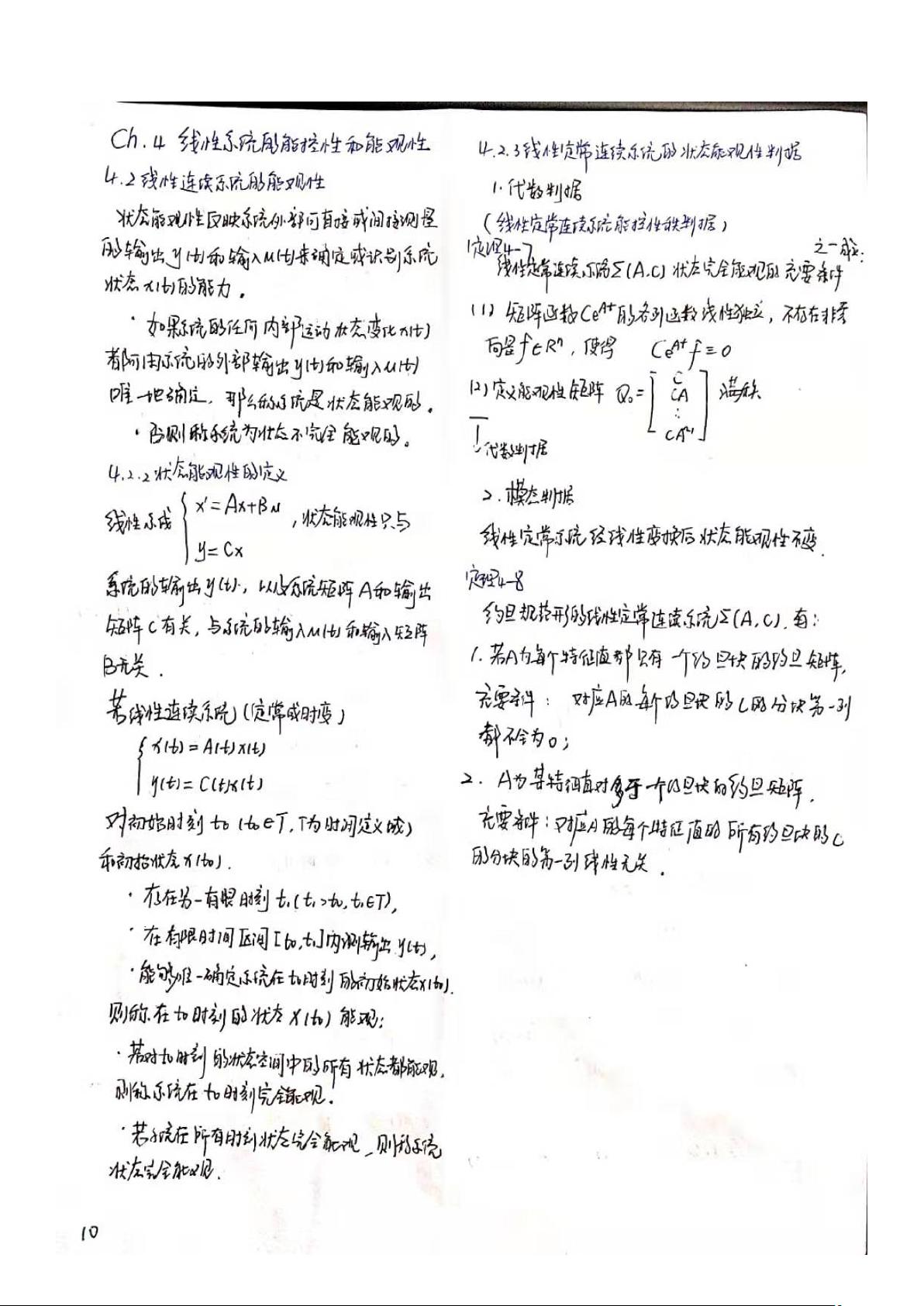
接下来,我们讨论“能观性”(Observability)。能观性是指系统能否通过其输出信号来完全确定系统内部状态。如果系统能从其输出序列推断出系统的初始状态,那么该系统就是能观的。能观性的判据通常基于格罗弗能观性矩阵(Gramian Observability Matrix)的秩。如果这个矩阵的秩等于系统的状态变量数目,那么系统是能观的。能观性的其他判据包括能观性指数、能观李雅普诺夫函数等。
能控性和能观性的关系紧密。一个系统同时满足能控和能观,意味着我们可以完全控制并监测系统的行为。这样的系统被称为完全能控和能观。在设计控制器时,通常会优先考虑这类系统,因为它们提供了最大的设计自由度。
在实际应用中,能控性和能观性分析对于系统设计至关重要。例如,在航空控制、机器人操作或电力系统管理中,我们需要确保系统能有效地响应控制输入并准确估计其状态。不满足能控性或能观性的系统可能会导致控制效果不佳,甚至可能导致系统不稳定。
此外,如果系统不能直接观测所有状态,我们可以通过设计合适的观测器(Observer)来增强系统的能观性。观测器是一种辅助系统,它根据系统输出和已知动态模型来估计系统的内部状态。巴特勒-莱斯观测器(Butler-Lausser Observer)和卡尔曼滤波器(Kalman Filter)是两种常见的观测器设计方法,它们在实际工程中有着广泛的应用。
线性系统的能控性和能观性是分析和设计控制系统的基础。通过理解和应用这些概念,工程师可以设计出高效、稳定且可预测的控制系统,以满足各种实际需求。在后续章节中,我们将进一步探讨如何计算和验证能控性与能观性,以及如何利用这些信息来优化控制策略。
@19108002-崔荣成
下载后可阅读完整内容,剩余5页未读,立即下载
170 浏览量
121 浏览量
2022-06-03 上传
101 浏览量
2012-07-28 上传
134 浏览量
2013-11-25 上传
2020-11-16 上传
185 浏览量
131 浏览量
2022-08-03 上传
151 浏览量
2022-11-14 上传
175 浏览量
159 浏览量
2012-12-24 上传
2009-06-25 上传
资源评论


蒋寻
- 粉丝: 30
- 资源: 319









最新资源
- MATLAB运动汽车測試視頻素材
- 中国95后年轻人视频消费机密报告.pdf
- 中国Android手机用户隐私安全认知调查报告.pdf
- 中国Android手机预装产业及用户使用情况研究报告.pdf
- 微电网二次控制,下垂控制,具有通信延迟的微电网分布式事件触发二次控制,实现了二次控制,效果好,有相关参考文献
- 中国互联网影视产业报告.pdf
- 中国消费者趋势2016.pdf
- matlab平台的 BP的水果识别.zip
- 中国专车市场分析报告.pdf
- 中秋&十一出行预测&交通指南.pdf
- 转型中的中国科研.pdf
- matlab平台的 BP神经网络的火焰识别.zip
- 澳大利亚5区14机59节点模型,可研究调压,调频,无功补偿,新能源并网等暂态
- 源荷不确定性 考虑源荷随机特征的热电联供微网优化matlab 复现王锐的《含可再生能源的热电联供型微网经济运行优化》 由风电机组、光伏电池、燃料电池、余热锅炉、燃气锅炉、蓄电池以及热电负荷构成的热电联
- python-3.13.1-amd64
- matlab平台的 GUI的水果识别.zip
