电力电子第八次 第八组 刘雨辰 姚艺翔 李凌霄1

需积分: 0 89 浏览量
更新于2022-08-08
收藏 498KB DOCX 举报
电力电子技术作为电气工程及其自动化专业的核心课程,其重要性不言而喻。它涉及到电力系统中电能的变换、控制、调节与应用等关键环节。随着工业自动化水平的提高,电机拖动系统作为执行机构的关键部分,其性能的优劣直接影响到整个系统的运行效率和稳定性。因此,加强对电机拖动系统的研究,特别是仿真研究,对于工程师和学生们来说,是一项重要的技能。
电机拖动系统的仿真研究可以帮助学生理解电机在不同工况下的行为,以及如何通过控制策略来实现电机的精确控制。本次研讨课程围绕着如何运用仿真软件对电机拖动系统进行模拟,并通过实验结果的分析,让学生们深入掌握电机控制的理论知识,并提高解决实际问题的能力。
在本次实验中,学生们将专注于鼠笼式异步电机的仿真。电机在工业中应用广泛,从驱动生产线上的各种机械设备到推动电动汽车,电机的工作性能至关重要。实验中将通过仿真软件模拟电机的正反向电动运行以及发电状态,这不仅使学生能够直观地观察到电机在不同运行模式下的表现,还能深入理解电机的内部工作原理。
在仿真过程中,学生需要调节交流电压的频率和幅值来控制电机的转速,这通常需要运用PID负反馈控制技术。PID控制是一种典型的闭环控制方法,由比例、积分和微分三部分组成,它能够有效提升控制系统的响应速度和准确性。比例控制是基于当前的误差进行调节,积分控制则能够消除长期累积的误差,微分控制则着眼于预测误差的变化趋势,三者结合能够确保电机在复杂工况下的稳定运行。
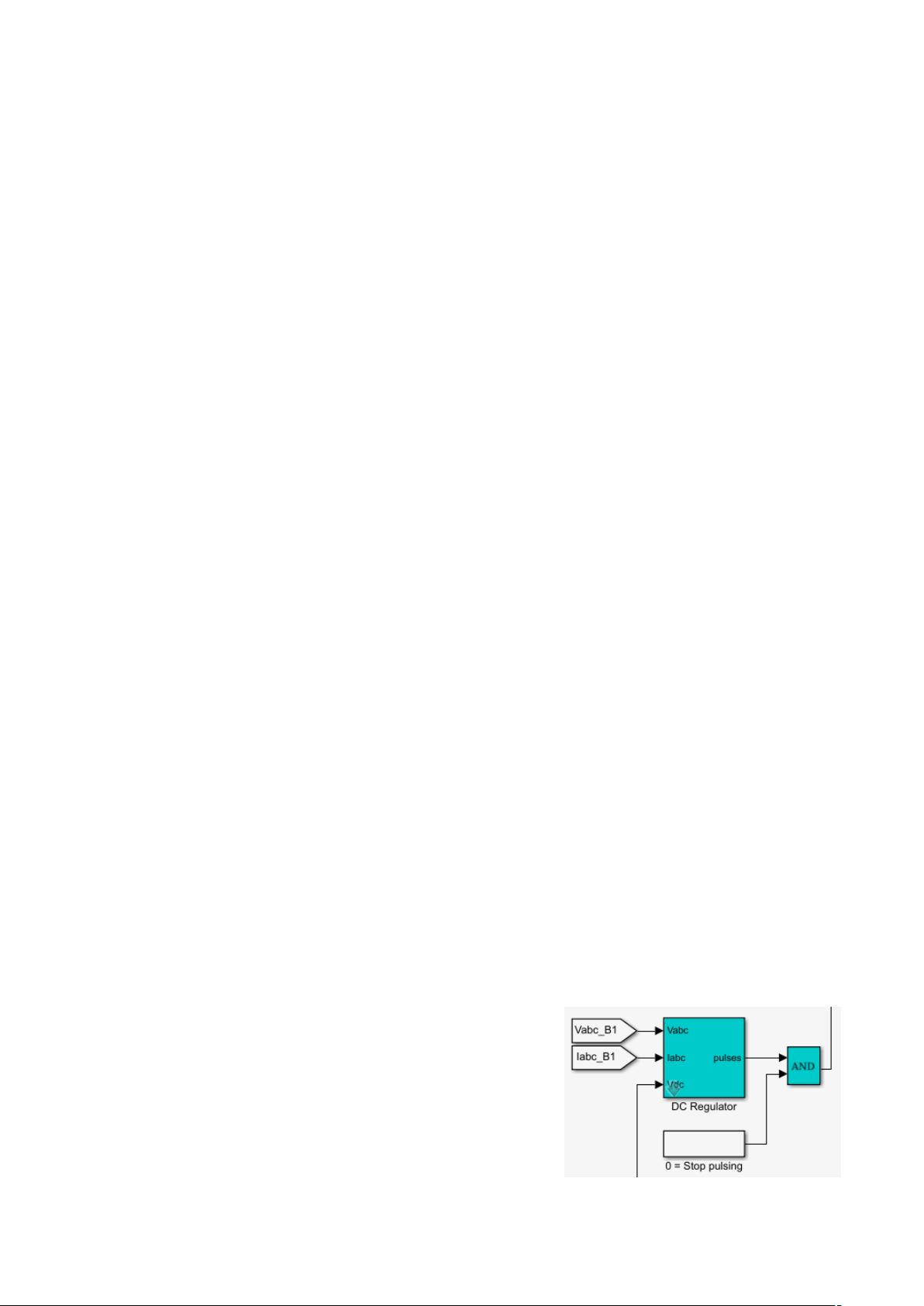
实验中,整流端变流器通过PID闭环控制直流侧电压,这能确保整个系统稳定运行。学生需要观察变流器的输出以及电机的响应,分析PID控制参数如何影响系统的动态性能。通过调节PID参数,学生可以学习如何快速找到最佳的控制策略,以实现电机转速的精确控制。
此外,变频器在电机控制中扮演了至关重要的角色。通过调整三相输出电压的频率和幅值,可以控制电机的转速。在仿真中,变频器的应用遵循恒定磁通频率比原则,这意味着电机在运行时磁通量保持不变,避免了磁路的过饱和现象。与此同时,通过改变电机负载转矩,可以实现电机的电动和发电状态切换,这对于电机在不同工业应用中的适应性至关重要。学生应学会如何利用变频器参数的调整来优化电机的运行效率。
最终,学生们需要对实验结果进行深入分析,这包括电路的构建、PID控制效果的评估,以及电机性能变化的观察。通过这些分析,学生们不仅可以将理论知识与实际操作相结合,还可以在仿真环境中识别和解决问题,为将来的工程实践打下坚实的基础。电力电子技术的学习不仅仅停留在理论知识的掌握上,更重要的是通过实际操作来验证和理解这些理论,从而为未来解决实际工程问题做好准备。
电 力 电 子 第 八 次 研 讨 课 报 告
电 气 工 程 学 院
电气工程及其自动化 专 业
李凌霄 2150400244
刘雨辰 2150400247
姚艺翔 2150400257
二〇一七年十二月
剩余6页未读,继续阅读
2022-08-08 上传
172 浏览量
144 浏览量
150 浏览量
2021-05-02 上传
166 浏览量
179 浏览量
2022-08-03 上传
123 浏览量
2018-06-04 上传
156 浏览量
140 浏览量
161 浏览量
168 浏览量
113 浏览量
123 浏览量
2022-08-08 上传
119 浏览量
2022-02-22 上传
资源评论


陈后主
- 粉丝: 39
- 资源: 340









最新资源
- 无焊接组装式动力配电箱.pdf
- 无人全自动生产 机器人助力摩托车焊接.pdf
- 无损检测技术在机械焊接结构中的应用.pdf
- 西安地铁二号线轨道移动式闪光焊接施工技术.pdf
- 西门子S7-200 SMART在栈板焊接机上的应用.pdf
- 西门子定位模块FM354在超声波焊接机上的应用.pdf
- 西气东输冀宁支线X80管线钢焊接工艺.pdf
- 西气东输用X70钢的自动焊焊接工艺.pdf
- 稀土耐磨合金管道焊接工艺.pdf
- 溪洛渡水电站泄洪深孔不锈钢复合钢衬焊接.pdf
- 溪洛渡右岸电站770MW发电机转子支架组装及焊接技术.pdf
- 细晶马氏体钢焊接质量控制要点.pdf
- 系列起重机焊接卷筒模块化类继承设计.pdf
- 细丝大电流MAG焊接机理.pdf
- 先进高强钢焊接工艺研究.pdf
- 1_521300264131-张之桢-基于Python的视频监控系统设计的设计与实现 (1).doc
