2.基于U_V视差算法的障碍物识别技术研究_上官珺1
需积分: 0 37 浏览量
2022-08-03
19:42:07
上传
评论
收藏 719KB PDF 举报

文章编号
: 1009 - 2269( 2011) 05 - 0018 - 06
基于
U-
V
视差算法的障碍物识别技术研究
*
上官珺
(
闽西职业技术学院 计算机系
,
福建 龙岩
364021)
摘要
:
介绍了
U-V
视差算法的数学模型和实现方法
,
给出了相应的实验结果
.
通过改进传统的
U-V
视差算法
,
引入直线拟合和聚类算法
,
使检测障碍物效率得到了很大的提高
.
实验表明改进后的
U-V
视差算法检测障碍物速度快
、
精度高
,
同时适合凹凸障碍物检测
,
是种较好的检测算法
.
关键词
:
障碍物检测
; U-V
视差算法
;
直线拟合
中图分类号
: TP391. 41
文献标志码
: A
0
引言
随着计算机科学和机器人技术的飞速发展
,
智能车辆研究已经取得了长足的进步
,
并且广泛
应用于军事
、
民用
、
科研等相关领域
.
基于机器视
觉的导航技术是智能车辆发展的关键
,
而障碍物
的检测及识别又是导航技术的重要方面
.
影响智
能车辆行驶的障碍物不仅包括车辆行进中遇到的
其它车辆
、
行人等凸障碍物
,
还包括坑
、
沟等凹障
碍物
[1]
.
要保证智能车辆在道路上安全行驶
,
就要
识别道路的可行区域
,
也就是避免与道路上的凸
障碍物相撞或者陷于凹障碍物中
.
障碍物检测算
法
,
特别是凹障碍识别方法
[1]
,
是智能车辆技术发
展的重要瓶颈
,
最近得到国内外研究机构的高度
关注
.
在机器视觉中
,
障碍物识别问题属于运动图
像分析
.
经典的机器视觉系统
,
会经过摄像机标
定
、
立体匹配
、
三维重建
、
目标识别等基本过程
.
由
立体匹配算法
[2-3]
得到深度图后
,
便可以进行障碍
物的检测工作
.
在深度图上进行障碍物检测
,
现在
已经形成很多算法
.
聚类算法
、
主平面法
、
基于直
方图的统计方法
、
边缘法等都是有效的障碍物检
测算法
.
1
基于
U-V
视差的障碍物检测算法
U-V
视差算法
[4]
是典型的直方图统计法之一
.
U-V
视差算法由于算法效率高效
、
检测精度高等优
点
,
在障碍物检测领域得到了广泛的应用
. U-V
视
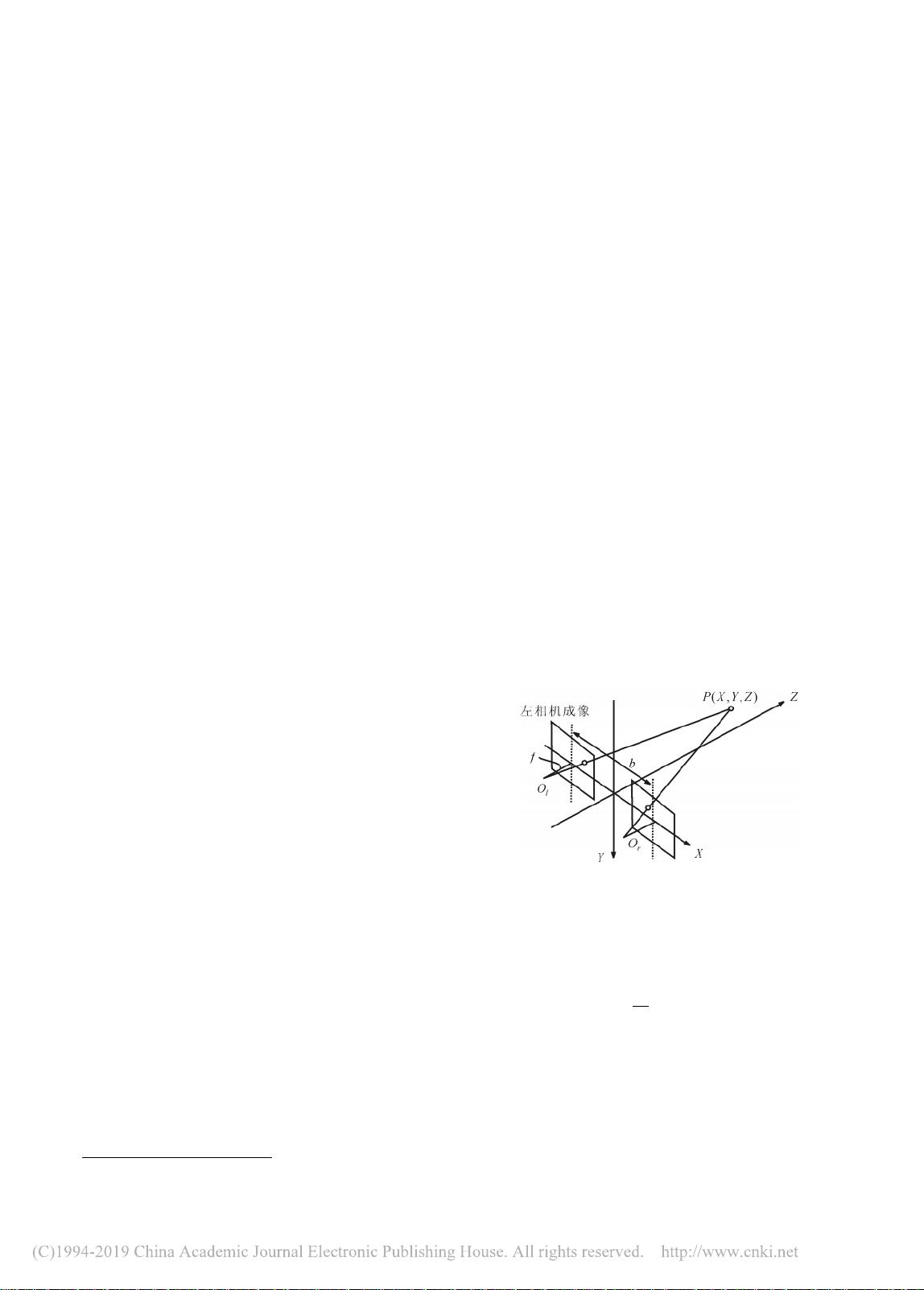
差算法使用的视觉系统模型如图
1
所示
.
图
1
视觉系统模型
1. 1
几何模型
在图像
I( u,v)
中
,u
是图像的列坐标
,v
是图
像的行坐标
.
由双目立体视觉原理
,
可以求得视差
d = x
l
- x
r
= f
b
z
. ( 1)
其中
,d
表示视差
,x
l
,x
r
分别表示对应点在左
右图像中横坐标的位置
,f
为摄像机焦距
,b
为双目
摄像机基线距离
,z
为场景点到摄像机成像平面的
距离
.
第
18
卷 第
5
期
2011
年
10
月
兰州工业高等专科学校学报
Journal of Lanzhou Polytechnic College
Vol. 18 No. 5
Oct. 2011
*
收稿日期
: 2011-07-12
作者简介
:
上官珺
( 1981-) ,
女
,
福建龙岩人
,
助教
.






评论0
最新资源