
RIFE: Real-Time Intermediate Flow Estimation for Video Frame Interpolation
Zhewei Huang
1
Tianyuan Zhang
1
Wen Heng
1
Boxin Shi
2
Shuchang Zhou
1
1
Megvii Inc
2
Peking University
{huangzhewei, zhangtianyuan, hengwen, zsc}@megvii.com, shiboxin@pku.edu.cn
Abstract
We propose RIFE, a Real-time Intermediate Flow Es-
timation algorithm for Video Frame Interpolation (VFI).
Most existing methods first estimate the bi-directional opti-
cal flows and then linearly combine them to approximate in-
termediate flows, leading to artifacts on motion boundaries.
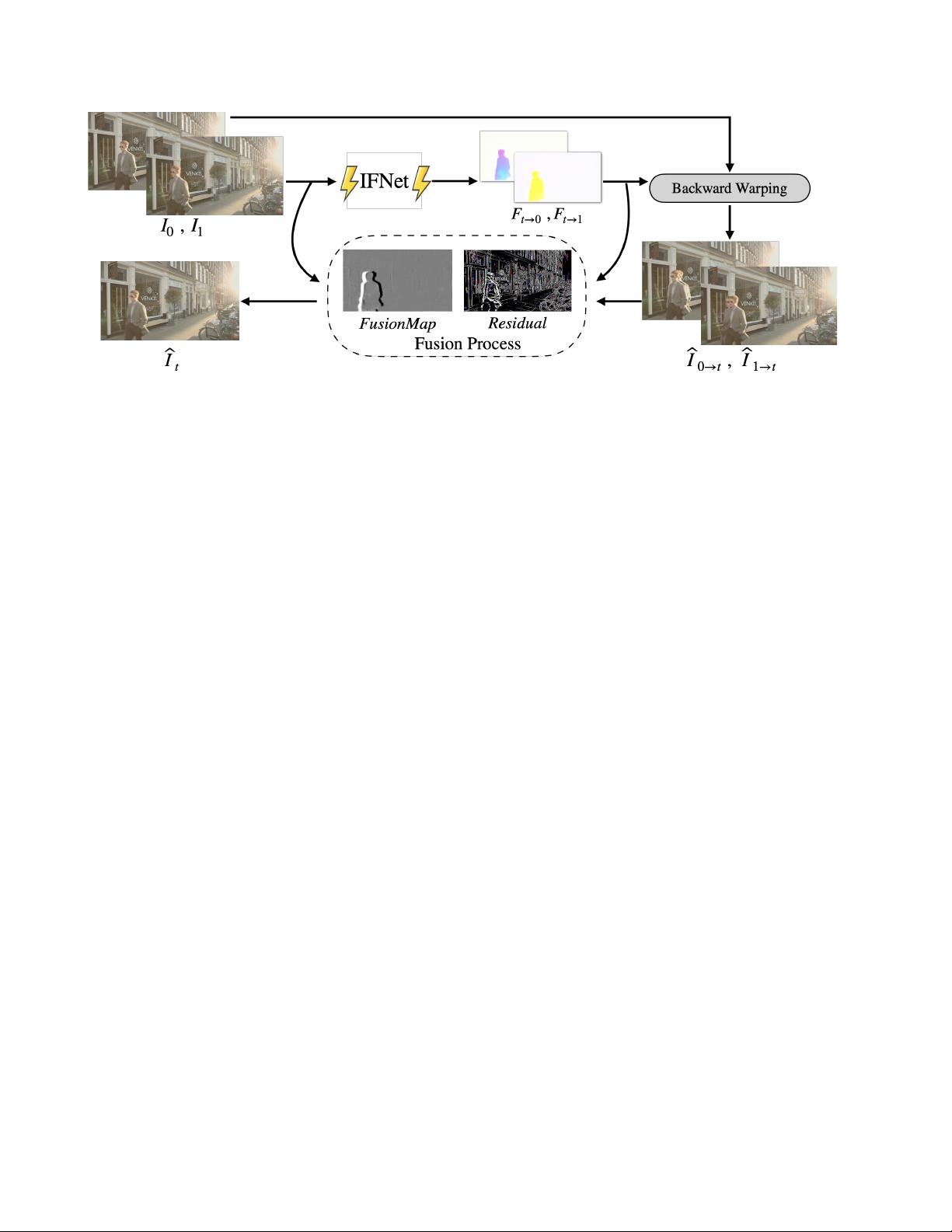
RIFE uses a neural network named IFNet that can directly
estimate the intermediate flows from images. With the more
precise flows and our simplified fusion process, RIFE can
improve interpolation quality and have much better speed.
Based on our proposed leakage distillation loss, RIFE can
be trained in an end-to-end fashion. Experiments demon-
strate that our method is significantly faster than existing
VFI methods and can achieve state-of-the-art performance
on public benchmarks. The code is available at https:
//github.com/hzwer/arXiv2020-RIFE.
1. Introduction
Video Frame Interpolation (VFI) aims to synthesize in-
termediate frames between two consecutive frames of a
video and is widely used to improve the frame rate and
enhance visual quality. VFI also supports various ap-
plications like slow-motion generation, video compres-
sion [31], and training data generation for video motion de-
blurring [4]. Moreover, VFI algorithms running on high-
resolution videos (e.g., 720p, and 1080p) with real-time
speed have many more potential applications, such as play-
ing a higher frame rate video on the client’s player, provid-
ing video editing services for users with limited computing
resources.
VFI is challenging due to the complex, large non-linear
motions and illumination changes in the real world. Flow-
based VFI algorithms have recently offered a framework
to address these challenges and achieved impressive re-
sults [17, 22, 35, 2]. Common approaches for these methods
involve two steps: 1) warping the input frames according to
approximated optical flows and 2) fusing and refining the
warped frames using a bunch of Convolutional Neural Net-
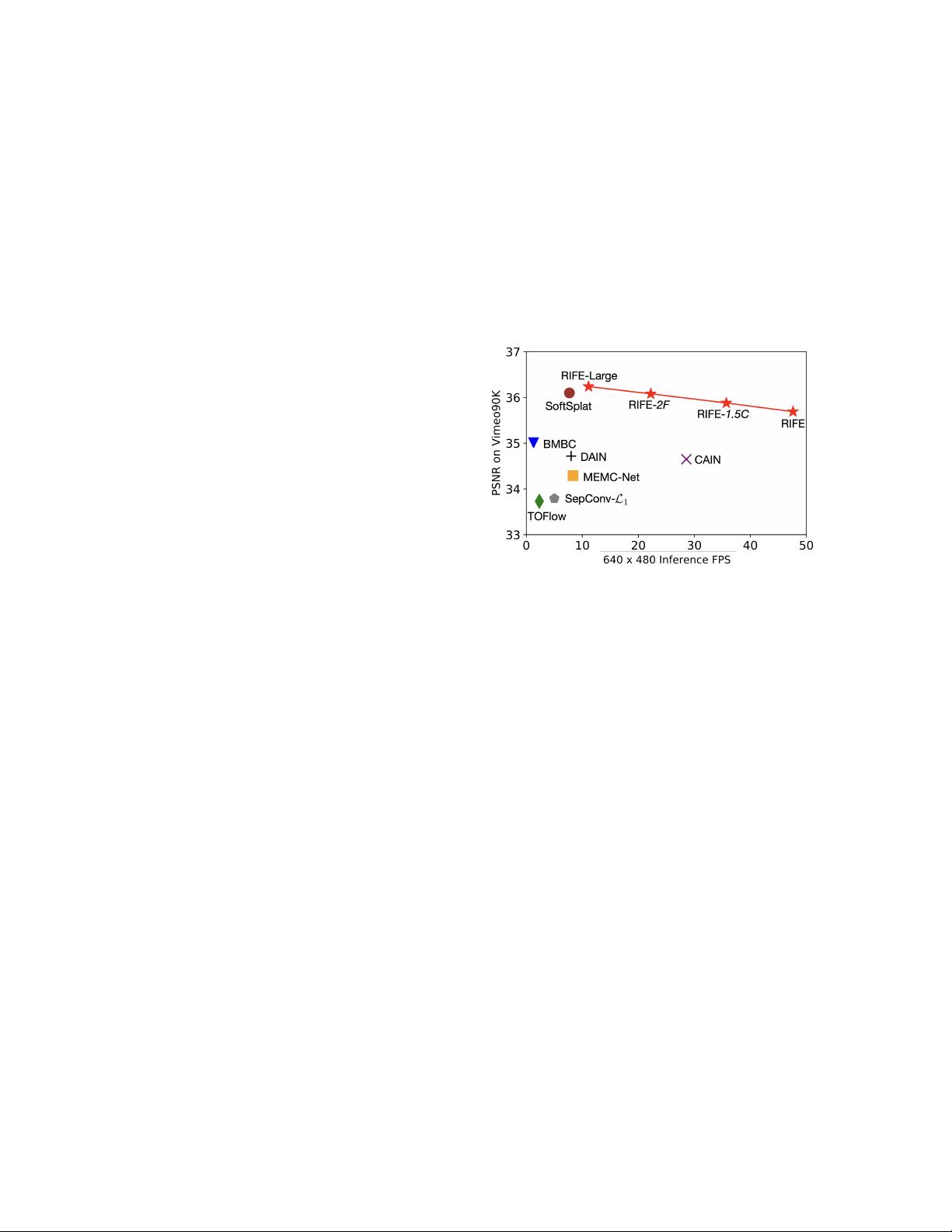
Figure 1: Speed and accuracy trade-off by adjusting
model size parameters C and F . We compare our models
with prior VFI methods including TOFlow [35], SepConv-
L
1
[24], MEMC-Net [3], DAIN [2], CAIN [8], Soft-
Splat [23] and BMBC [26] on the Vimeo90K testing set.
works (CNNs).
According to the way of warping frames, flow-based VFI
algorithms can be classified into forward warping based
methods and backward warping based methods. Backward
warping is more widely used because forward warping lacks
unified and efficient implementation and suffers from con-
flicts when multiple source pixels are mapped to the same
location, which leads to overlapped pixels and holes.
Given the input frames I
0
, I
1
, backward warping based
methods need to approximate the intermediate flows
F
t→0
, F
t→1
from the perspective of the frame I
t
that we are
expected to synthesize. Common practice [17, 34, 2] first
computes bi-directional flows from pre-trained off-the-shelf
optical flow models, then linearly combines them. This
combination, however, will fail on motion boundaries, as
there will be different objects in the two frames. Conse-
quently, previous VFI methods share two major drawbacks:
1) To solve the artifacts brought by the linear combination
of optical flows, previous methods usually need to ap-
proximate various representations, e.g., image depth [2],
intermediate flow refinement [17]. Coupled with the
large complexity in the bi-directional flow estimation,
1
arXiv:2011.06294v2 [cs.CV] 17 Nov 2020
剩余9页未读,继续阅读













评论0