机器人动作指令1
需积分: 0 69 浏览量
2022-08-08
21:18:38
上传
评论
收藏 79KB DOCX 举报

步态
步态构造函数:
头文件:#include <RobotisOp2GaitManager.hpp>
函数:RobotisOp2GaitManager(webots::Robot *robot, const std::string &iniFilename);
改变步态参数办法:
头文件:#include <RobotisOp2GaitManager.hpp>
函数:
void setXAmplitude(double x);
void setYAmplitude(double y);
void setAAmplitude(double a);
void setMoveAimOn(bool q);
void setBalanceEnable(bool q);
X 影响足步向前的长度,它可以取-1 到 1 之间的任何值。
Y 影响到侧方向的足部长度,它可以取-1 到 1 之间的任何值。
A 影响步态的角度,也允许机器人在行走过程中旋转,它可以取 0 到 1 之间的任何值。
如果 MoveAimOn 被设置,它允许机器人通过旋转的感觉旋转物体,它可以用来旋转一个球来把它踢向正确的方向。
如果设置了平衡器,陀螺仪就会在控制回路中使用,使行走步态更加稳健。
动作
做出动作
头文件:#include <RobotisOp2MotionManager.hpp>
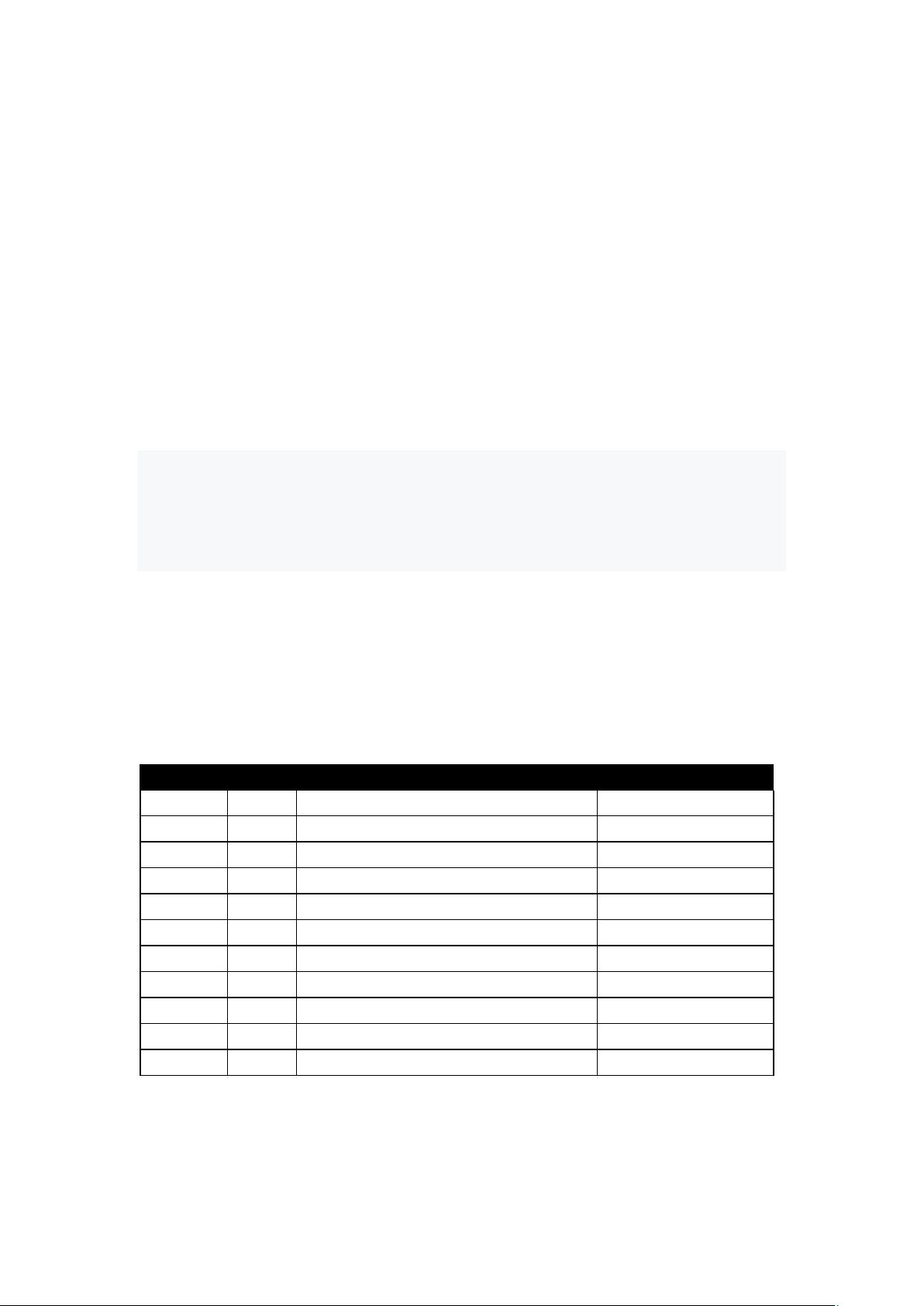
函数:void playPage(int id);
page number
page title
brief description of page
notes
1
init
DARWIN-OP initial standing pose
4
hi
DARWIN-OP bowing greet
12
rk
DARWIN-OP doing a right kick (from Soccer mode)
13
lk
DARWIN-OP doing a left kick (from Soccer mode)
15
sit down
DARWIN-OP on its knees
23
d1
DARWIN-OP "yes, go!" (from Interactive mode)
24
d2
DARWIN-OP "wow!" (from Iteractive mode)
27
d3
DARWIN-OP "ooops!" (from Interactive mode)
38
d2
DARWIN-OP "bye bye" (from Interactive mode)
starting page
41
talk2
DARWIN-OP "introduction" (partial, from Interactive mode)
starting page
54
init
DARWIN-OP "clap please" (from Interactive mode)
starting page, excludes page 57
关于 playpage()的补充













评论0