FANUC机器人的先执行距离指令详解(一).docx
版权申诉

FANUC 机器人的先执行距离指令(一)
功能描述:在机器人的 TCP 相对动作指令的目标位置到达所指定的距离以内时,与机器人
的动作并行地调用程序或进行信号的输出。
举个简单例子:
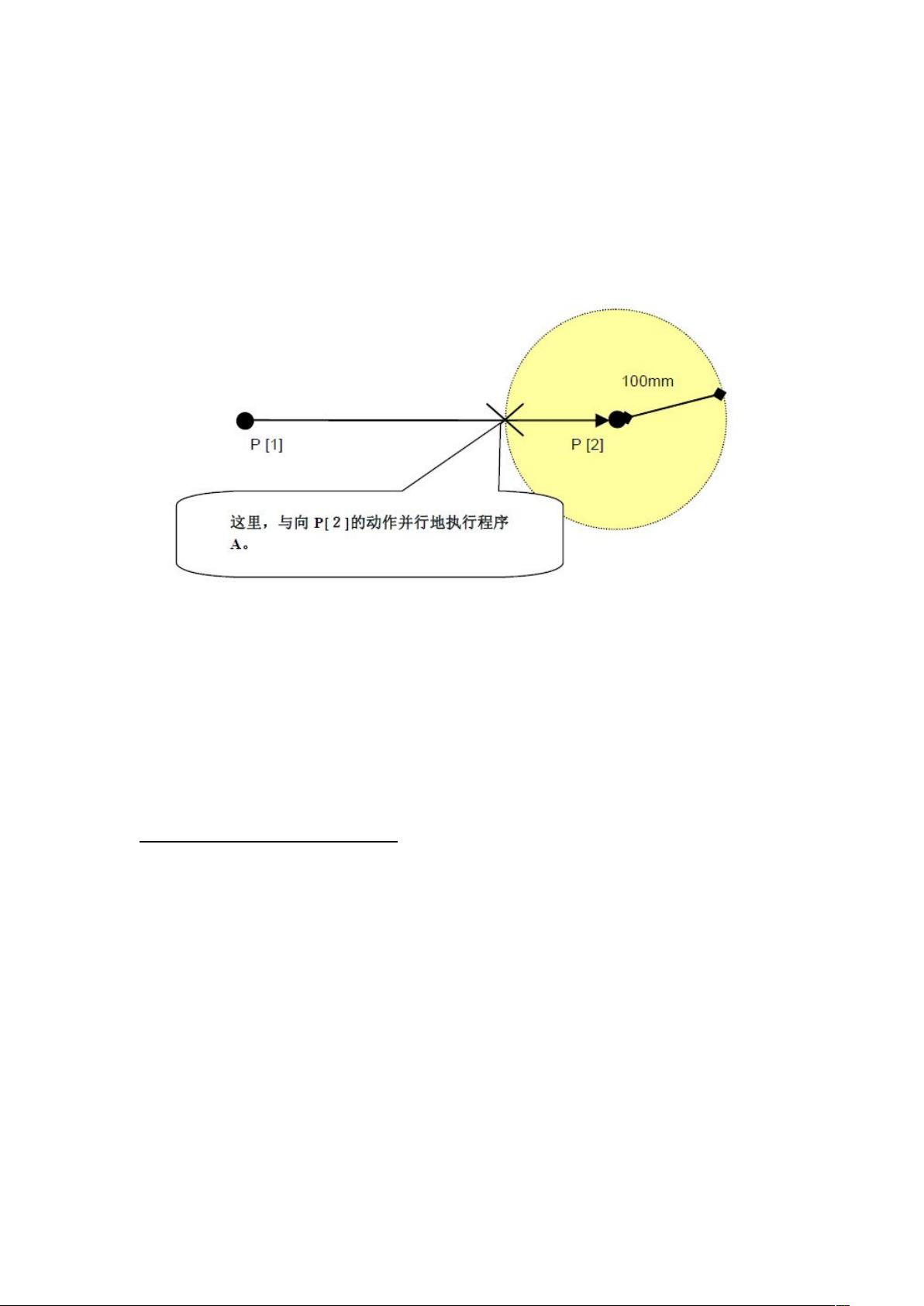
1:J P【1】100% FINE
2:L P【2】1000mm/sec FINE DB 100mm,CALL test
解释:在到达 P【2】点 100mm 的距离内,调用 test 子程序
指定的距离范围:0.0mm~999.9mm,根据动作速度,有的情况下指定距离与实际距离之间会
有一定的偏差。
触发条件:TCP 从动作目标点进入上述指定距离以内的区域的情形,根据动作速度,有的
情况下指定距离与实际距离之间会有一定的偏差。
条件成立时可执行的指令:(1)信号输出;(2)调用程序;(3)点逻辑指令。不能在调
用程序中指定动作组。只可执行逻辑指令!
使用此功能的前提条件:
需要在系统变量里,先将变量$SCR_GRP[1].$M_POS_ENB 改为 TRUE。
指令的格式:
动作指令 +DB
距离指定值,执行指令
注意事项:该指令仅可作为动作指令的附加指令来使用。不能作为单独指令进行示教!
距离指定值的含义:
先执行距离指令,在 TCP 进入目标点为中心的球形区域内时,执行该指令。指定该球体范
围的大小,即距离指定值(0~999.9mm)。将该球体范围叫做触发区域。
举个例子:
1:L P【1】 1000mm/sec FINE DB 10.0mm DO[10]=ON
2: L P【1】 1000mm/sec FINE DB 15.0mm DO[8]=ON
资源评论

 石陈2022-06-17用户下载后在一定时间内未进行评价,系统默认好评。
石陈2022-06-17用户下载后在一定时间内未进行评价,系统默认好评。

AAA_自动化工程师
- 粉丝: 5841
- 资源: 3327

下载权益

C知道特权

VIP文章

课程特权
开通VIP











