

第四章 空间机构的运动分析
u
1
j
P
1j
u
1j
j
j
u
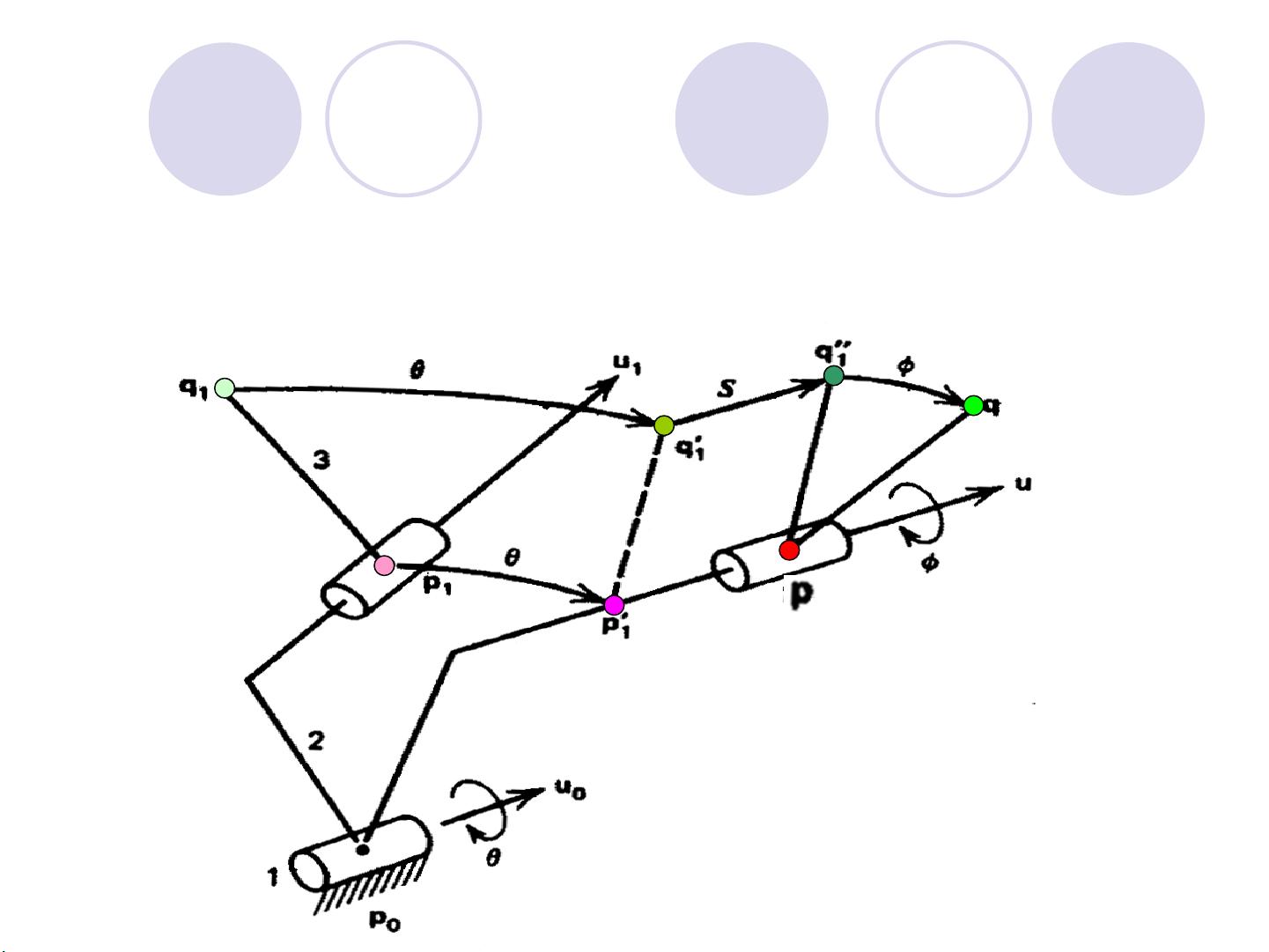
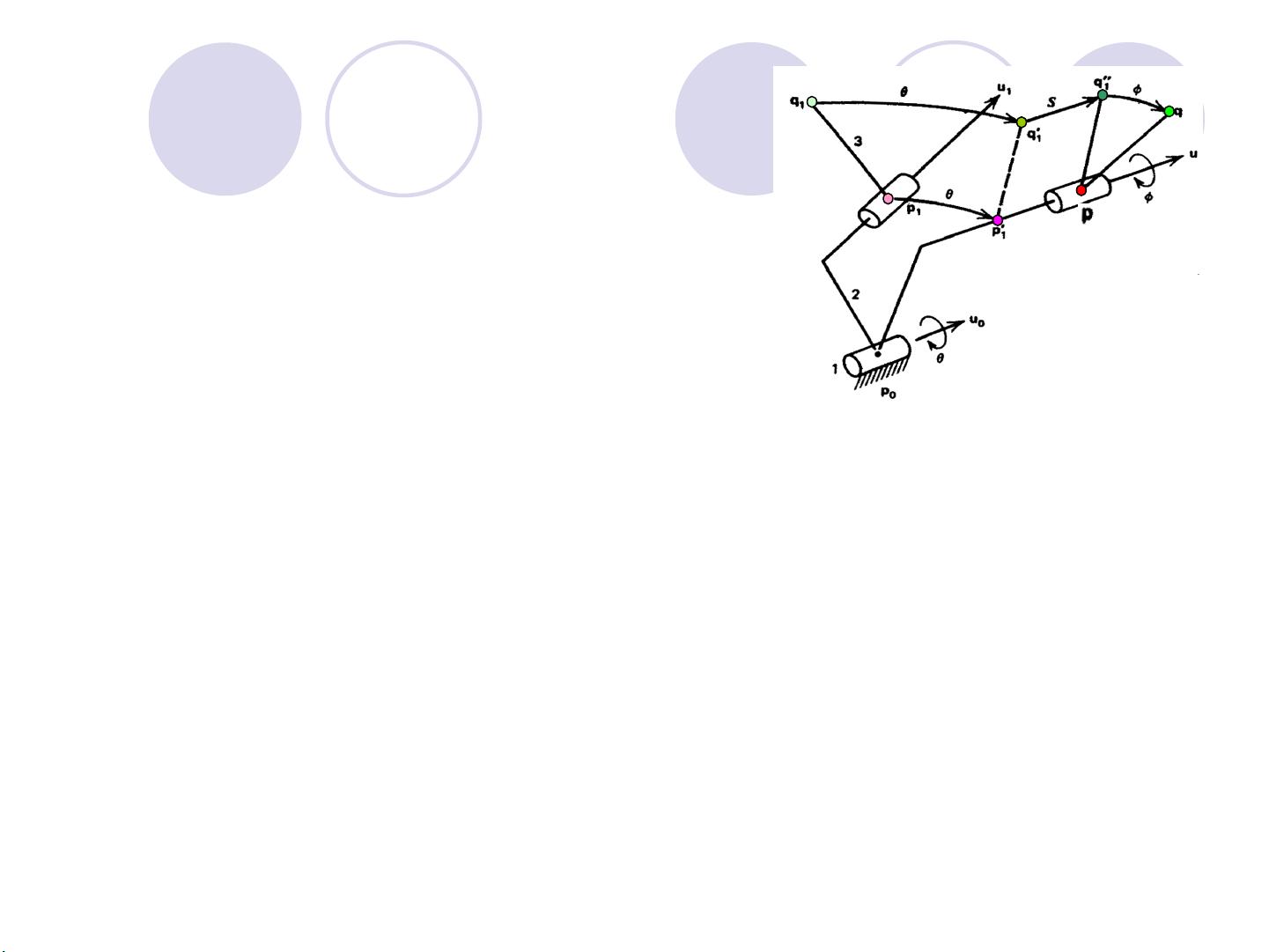
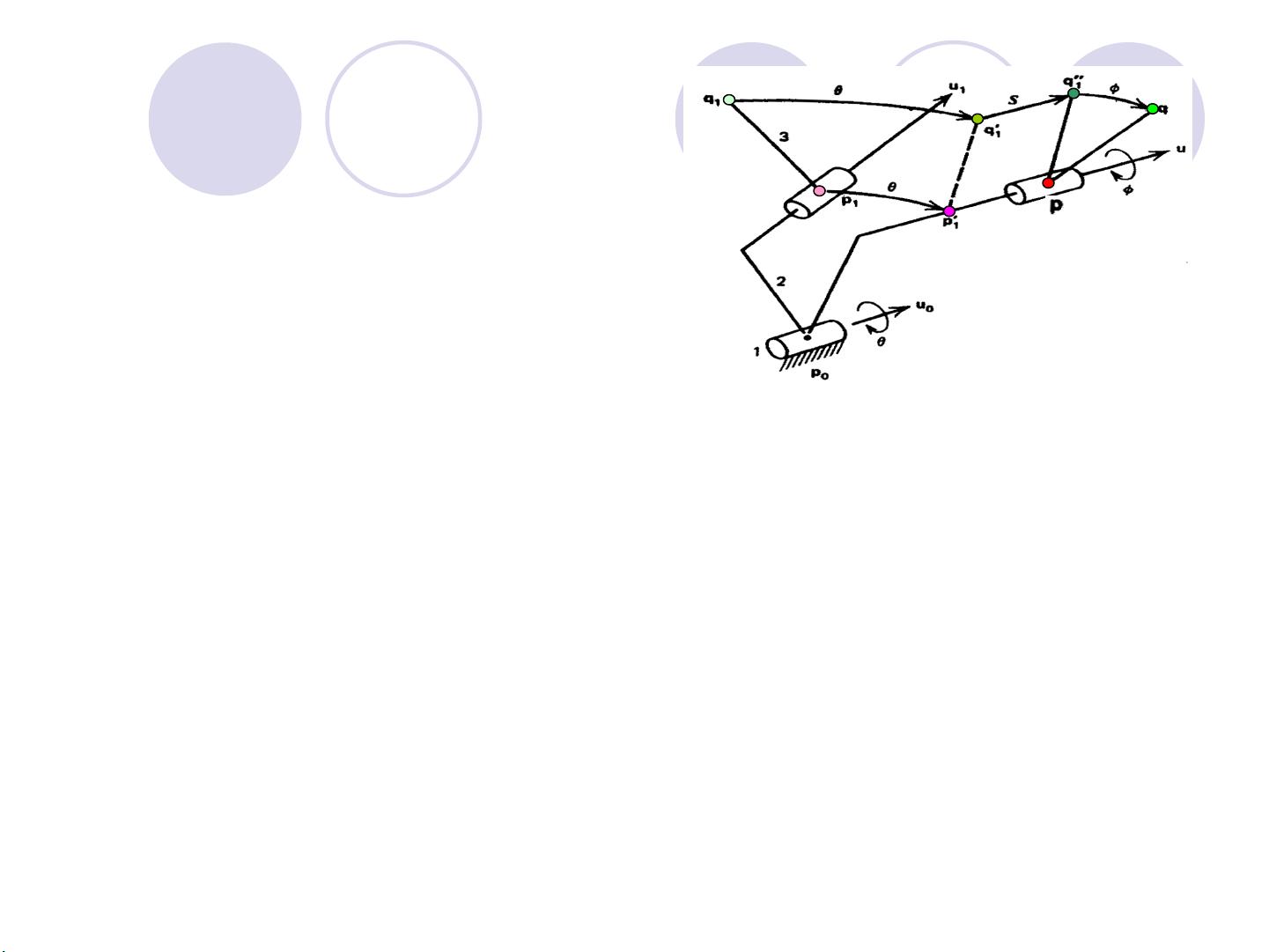
有两个既独立又相连接的刚体在运动副的限制和约束下作
相对运动,为了描述刚体上某点的绝对运动。由图表示法,
设运动链中j相对于前一个构件j-1而运动。
上的参考点
又随
,绝对角位移为
,j的绝对角位移
,其有限旋转轴为
假设相对运动的轴线
构件j-1的有限旋转轴为
构件j-1一起运动。
§ 4—1 空间相对运动

剩余34页未读,继续阅读

仙夜子
- 粉丝: 44
- 资源: 325









最新资源
- JavaScript函数
- java-leetcode题解之Range Sum Query 2D - Mutable.java
- java-leetcode题解之Random Pick Index.java
- java-leetcode题解之Race Car.java
- java-leetcode题解之Profitable Schemes.java
- java-leetcode题解之Product of Array Exclude Itself.java
- java-leetcode题解之Prime Arrangements.java
- MCU51-51单片机
- java-leetcode题解之Power of Two.java
- java-leetcode题解之Power of Three.java
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0