硬件说明1
需积分: 0 100 浏览量
2022-08-03
23:31:33
上传
评论
收藏 581KB PDF 举报

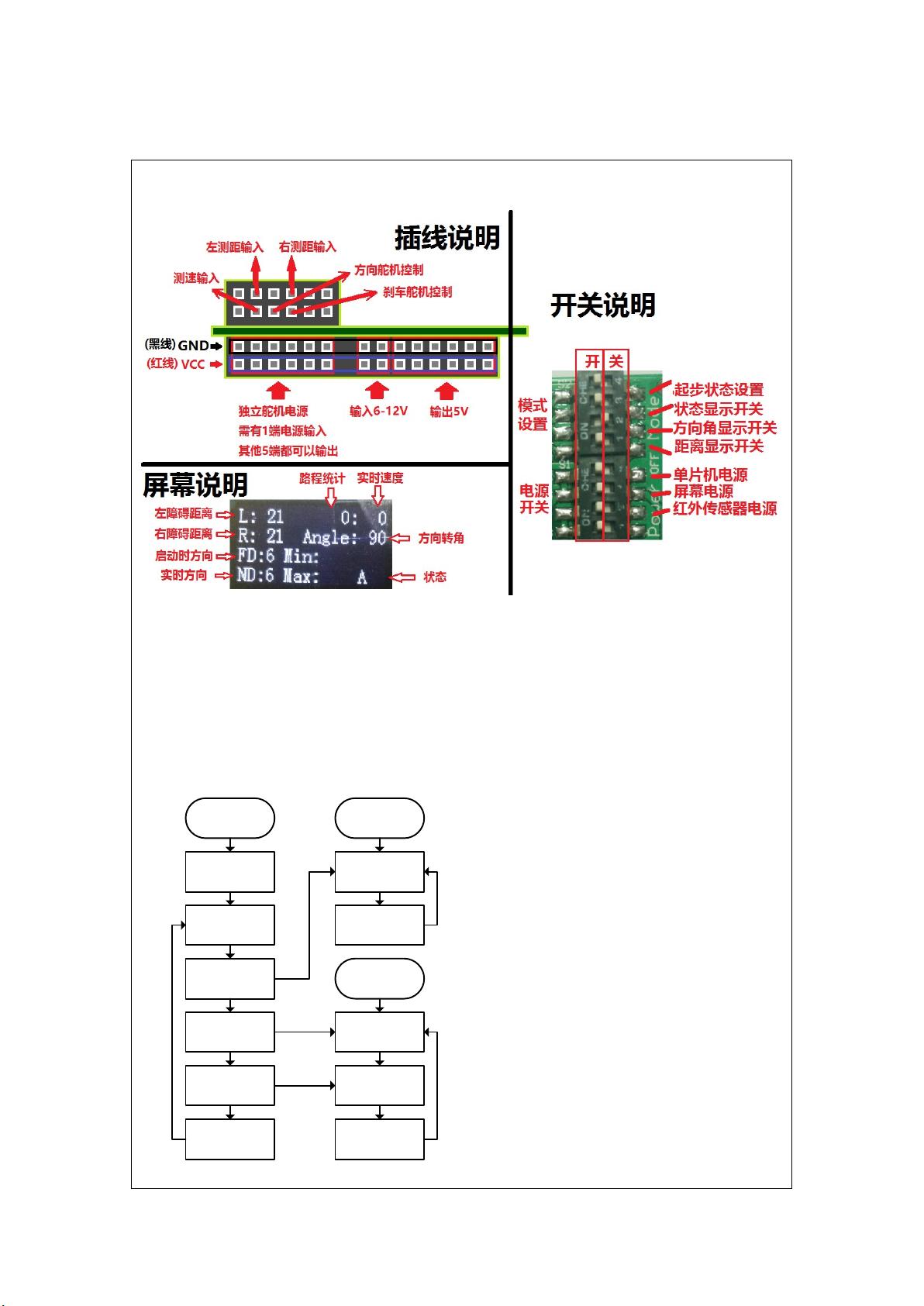
一、小车使用(调试)说明(请逐项说明,可附图)
1.电路硬件说明:
注:1.使用两个电源。一个 4~6V 舵机电源,一个 6~12V 主控板电源。
2.用电子罗盘测方向,分为 8 个方向,用于判断过弯道,关闭刹车加速冲坡。
3.方向转角 90 度为正前,左满偏 60 度,右满偏 120 度。
4.状态为赛道分段,A 状态为起步避障赛道段,B 状态为弯道至坡段,C 状态为下坡
至最后。判断状态用于是否刹车。
5.模式开关:关闭显示可以加快程序避障检测,实测开了也不慢,避障算法有待改善。
2.软件算法说明:
检测左右障碍
距离
计算新左右偏
转角度
检测行进速度
检测行进方向
主程序初始化
定时器0/1中
断初始化
定时中断0
初始化
等待新偏转角
度信号
调整方向角度
定时中断1
初始化
判断速度值
判断是否过弯
显示相关数据 刹车 / 不刹车
主程序启动会初始化两个定时
中断,分别控制两路 PWM 电平 翻
转输出,用于控制方向舵机,主程序
只需要向指定变量写入角度值即可。
主程序程序实时判断障碍并计
算出目标方向角度,定时中断程序会
使当前角度慢慢偏向目标角度,实现
平滑过渡转向。
方向检测到大幅度变化(超过 3
个方向(共划分为 8 个),即变化 180
±45 度),即判断过弯,就关闭刹车。
若坡道起步就设置开关 B 状态起步,
一开始不刹车。













评论0