0.2mpu6050知识笔记1
需积分: 0 162 浏览量
2022-08-08
21:01:39
上传
评论
收藏 871KB DOCX 举报

参考《野火》第 50 章
拿芯片时,要拿着线改变姿态!!!!而不是拿着芯片晃动!!!
一, 姿态基本概念
1. 姿态:姿态就是“载体坐标系”和“地理坐标系”之间的转换关系。初始状
态“载体坐标系”和“地理坐标系”想重合,根据“载体坐标系”和“地理
坐标系”之间的差值变化来反应物体的姿态。(例如初始状态“地理”和“载
体”z 朝上,“载体”的 z 突然朝下,则“地理”和“载体”z 相反,判断出
物体翻了)
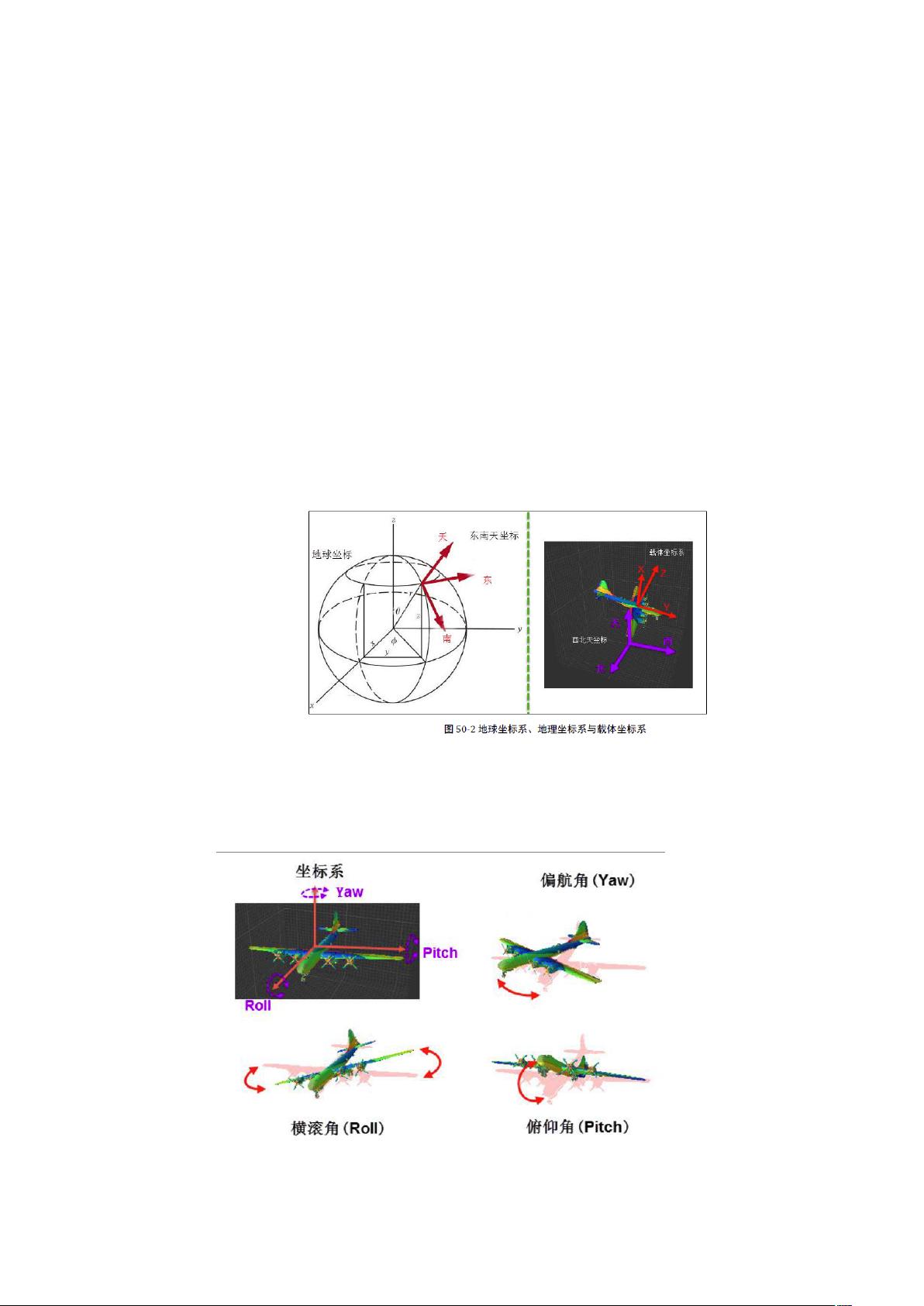
地球坐标系:地球球心为原点,z 轴即地球自转轴,xy 轴在赤道切面上,y 轴指向
本初子午线。(GPS 模块讲经纬度用到这个坐标)
地理坐标系:物体在地球表面所在的点为原点。重力方向的反方向为 z 轴正方向。
xy 轴切向经纬线。分为“东北天(x 指东 y 指北 z 指天),东南天(x 指东 y 指南),西北
天(x 指西 y 指北)”等坐标。(平常用的最多的,就实际中的东南西北)(笛卡尔坐标系)
载体坐标系:物体质心为原点,z 指向物体顶部,y 指向物体头部,x 指向物体两侧
如图“地理”y(紫色)与“载体”y(红色)夹角为负,判断出飞机要降落
2. 通过“地理”和“载体”的关系得出姿态,即引出三个角偏航角(Yaw) ,
俯仰角(Pitch),横滚角(Roll)
之前的理解不正确,概念模糊,下文正确的描述下。













评论0