
图形学第二次大作业报告
515110910011 李晗东
一、 题目概述
在作业 1 基础上添加场景建模、视觉效果及动画
优化 FKR 行动策略,自动决策,并根据决策实现加速度、速度和位置的变换
(20 分)
实现目标对象、Anti-FKR 的模型导入和运动决策,实现场景动画(35 分);
构建故事发生的场景 3D 模型,并设置光照(25 分)
作业报告(20 分)
二、 基本设定
1. 当目标在 FKR 的感知范围内是,FKR 可以发现目标并得到目标的参数
2. 假定给定空间中,从 FKR 到小人的运动空间内没有障碍物
3. 假定人只在广场的平台上走动
4. 假定广场上装有 antiFKR,它是一种远距离电磁脉冲炮,即发射的并不是实体而是
干扰信号,能够有效的使得某个方向的一定范围内的电子设备瘫痪
5. FKR 的运动缺陷分析:
a. FKR 的目标很明确,是人的头骨,因此可以着重保护人的头骨来进行防范。
b. FKR 可以躲避低速的实体攻击,但这意味着对于无实体的攻击(如强电磁信
号)FKR 没有躲避能力。(本次实现采用这种方式)
c. FKR 通过人脸识别+红外追踪来锁定目标,可以通过在空气中释放干扰烟雾和
干扰热源来使得 FKR 失去目标。
三、 实现简述
1. 用到的库:
1) Assimp v3.3.1
2) SOIL2
3) glm
4) GLFW
5) GLEW
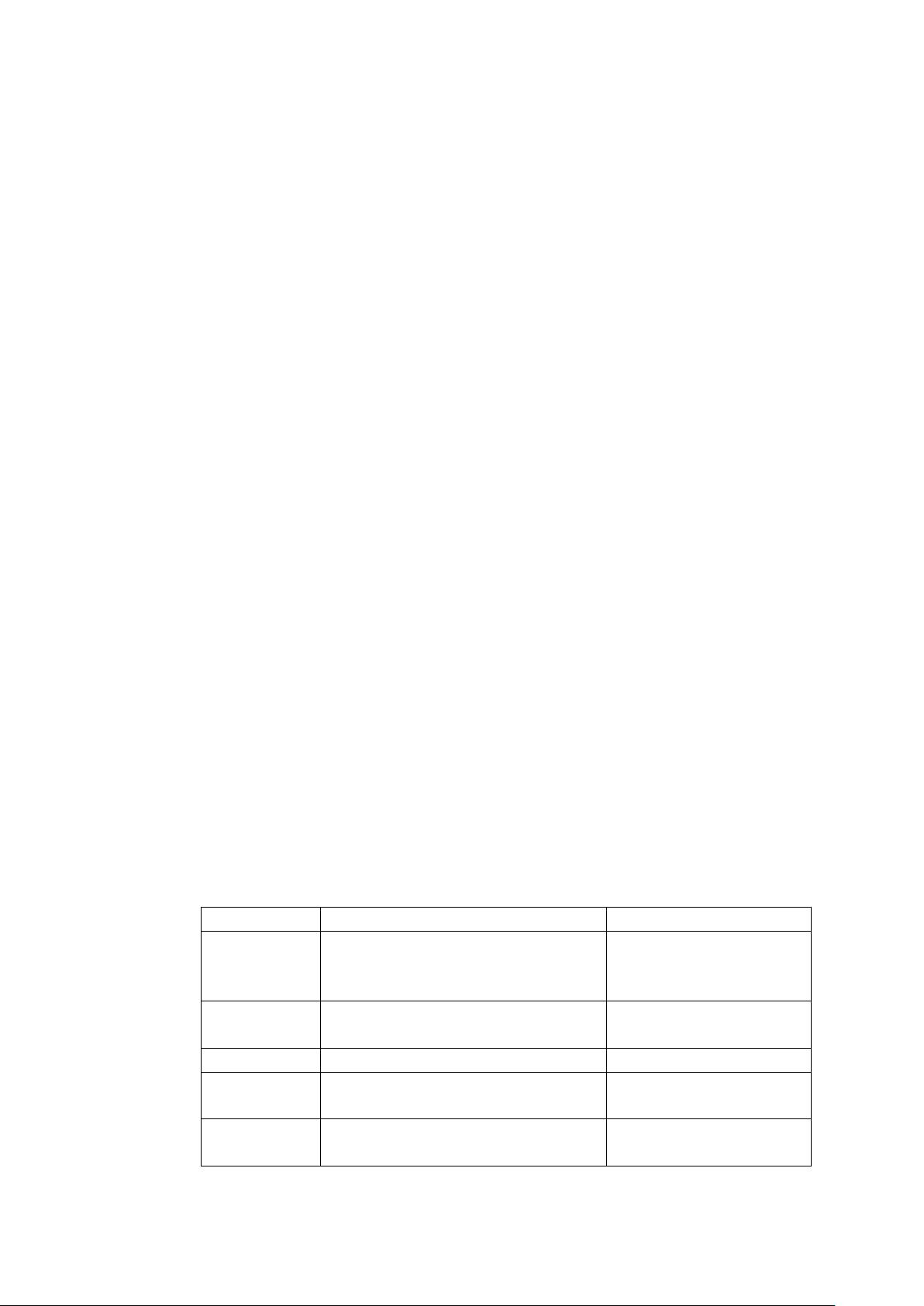
2. 类的设计
这次作业中设计的类及其简述如下:
类名称
简述
代码文件
Mesh
用于处理 Assimp 加载的模型数据,
此部分代码是参考网上的教程完成
的
Mesh.h
Drone
无人机的基本实现,包含了无人机
的基本参数和运动模式的实现
Drone.h
Drone.cpp
Camera
用于处理鼠标对视角的改变
Camera.h
Human
人物的基本实现,包含了人的基本
参数和运动模型的实现
Human.h
Human.cpp
Model
使用 Assimp 将库导入,实现了绘制
的功能
Model.h













评论0