在机器人和自动化设备中,电机与运动控制是至关重要的组成部分。本文主要讨论了直流减速电机在机器人腿部构造中的应用以及如何通过单片机进行控制。
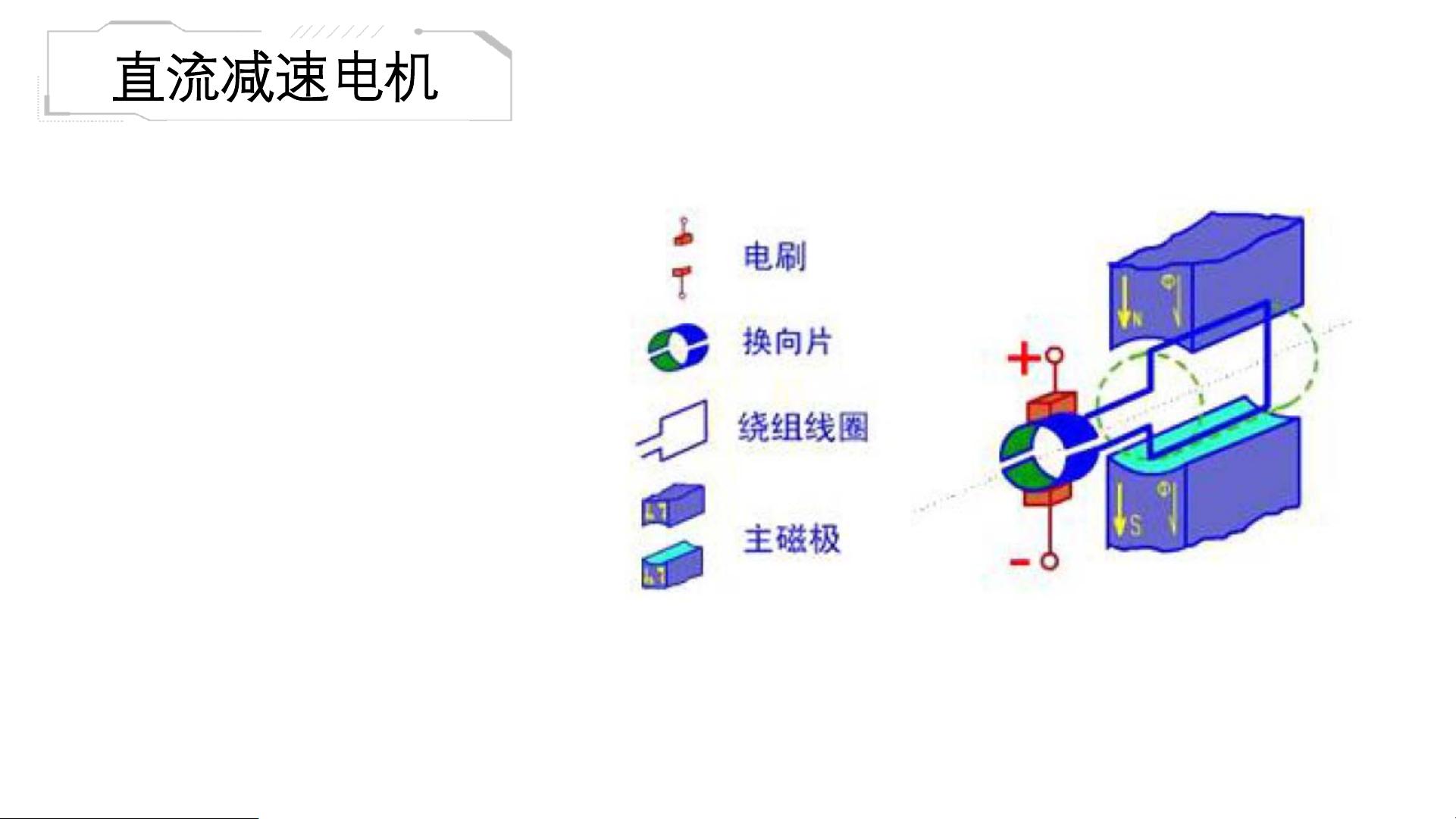
直流电机是一种常见的电动机类型,当它接收到直流电后,电机的磁极会根据电流的方向决定其旋转方向。电压的大小则直接影响电机的转速,电压越高,转速越快。在描述中提到的直流电机采用铝壳封装,这种设计有助于散热,提高电机的工作效率。
减速器是与直流电机配合使用的机械装置,它的主要作用是降低电机的转速,同时增加输出扭矩。在机器人中,这有助于提供更大的推动力,尤其是在需要精细控制速度和力量的情况下,如机器人的腿部运动。
电机的控制主要涉及到转向和调速两个方面。转向通常通过改变电机两端的电压极性来实现,即上正下负为正转,下负上正为反转。调速则可以通过改变施加在电机上的电压来调整,但在数字电路中,电压的平滑改变通常通过PWM(脉冲宽度调制)技术来实现。PWM是通过调节脉冲信号的占空比来模拟不同电压的效果,占空比范围一般在0%到100%,对应0V到最大电压。
在实际应用中,单片机的IO口无法直接驱动电机,因为电机所需的电压和电流远超单片机的输出能力。因此,需要一个电机驱动电路,例如TB6612,它能将单片机的低电压信号转换为足以驱动电机的大电流。TB6612支持高达100KHz的PWM频率,可以提供1.2A或3.6A的电流,并具有过热和低压保护功能。通过设置不同的输入引脚,可以控制电机的正反转和速度。
在代码示例中,可以看到使用Arduino编程的场景,通过定义不同的引脚来控制电机的运动。例如,`Right_motor_pwm`和`Right_motor_go`引脚分别用于控制右电机的速度和方向。如果电机转动方向不正确,可能是因为引脚配置错误或者电机接线问题,可以通过检查和调整引脚配置及电机连接来解决。
为了实现更复杂的运动控制,如四轮机器人的前进、后退、转弯等,需要对左右两侧的电机进行独立控制。通过调整两侧电机的速度差,可以实现精确的转弯。此外,良好的程序设计习惯是将相关的代码模块化,这样便于代码的管理和复用。在本例中,`carMove`模块专门负责车辆的运动控制,包含初始化和具体动作控制的函数。
总结起来,电机与运动控制涉及直流电机的工作原理、减速器的作用、PWM调速技术、电机驱动电路的选择以及模块化编程。理解这些知识点对于设计和控制机器人或自动化设备至关重要。















评论0