VINS-mono詳細解讀 - 掃文資訊1

需积分: 0 193 浏览量
更新于2022-08-03
收藏 1.2MB PDF 举报
VINS-mono是一种单目视觉惯性里程计(Visual-Inertial Odometry,VIO)算法,由香港科技大学开源,其主要目标是通过融合单目摄像头图像和IMU数据来实时估计运动设备的三维位置、姿态、速度以及重力矢量,并解决尺度漂移问题。以下是对VINS-mono算法的详细解析:
1. 特征点跟踪
VINS-mono首先在第一帧图像上选择最强的150个特征点,并赋予唯一ID。在下一帧图像中,利用光流法跟踪这些特征点并寻找匹配。匹配点会经过相机畸变校正和平面归一化处理,然后通过F矩阵和RANSAC算法进行筛选。同时,算法会在未匹配区域寻找新的强特征点,以保持特征点数量恒定为150个。将校正后的特征点位置发送出去,形成连续帧间的特征点跟踪。
2. 初始化
- 外参旋转:通过机器人手眼标定方法计算相机与IMU之间的相对旋转。结合陀螺仪积分和8点法确定。
- Structure from Motion (SfM):选取关键帧窗口内的帧,通过三角定位和PnP算法估计关键帧之间的位姿。使用Ceres求解器优化图像位姿和三维点的位置,减少重投影误差。
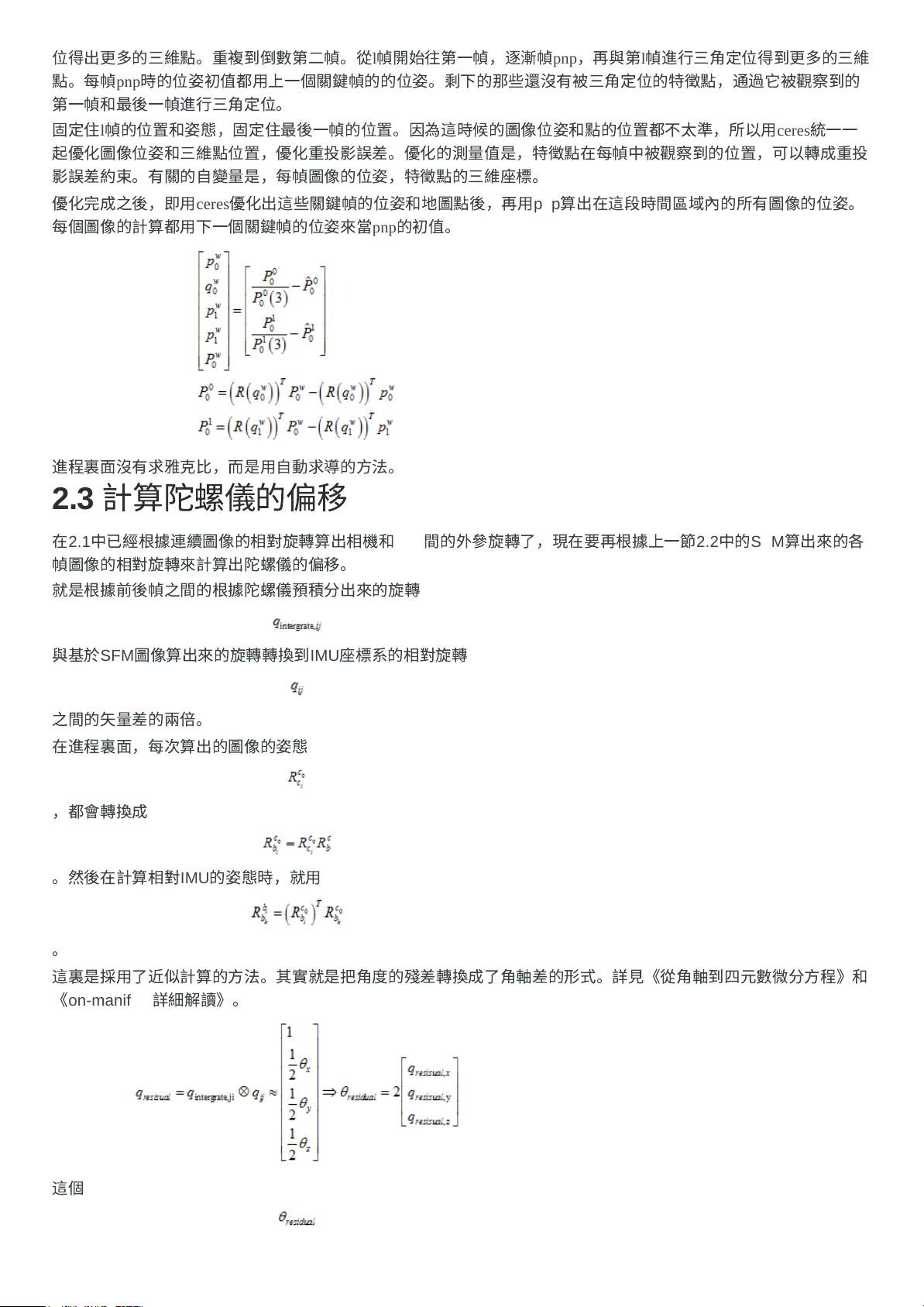
- 陀螺仪偏移计算:基于SfM结果计算连续图像的相对旋转与陀螺仪测量的差异,以估计陀螺仪的偏置。采用近似方法转换角度残差为角轴差形式,然后使用高斯-牛顿法求解偏移。
3. 正常跟踪
- 在初始化完成后,VINS-mono进入正常跟踪阶段,利用IMU预积分和图像特征点更新状态估计。每帧图像的预积分会考虑陀螺仪偏移,雅克比矩阵和协方差矩阵会随时间演变。
4. 速度、重力和尺度估计
- 在初始化阶段,速度、重力和尺度是未知的。随着跟踪的进行,它们通过比较预测值和实际观测值的误差进行更新。初始值通常设为零。
VINS-mono的高效之处在于紧密耦合了视觉和惯性数据,能够实时处理传感器数据并提供高精度的定位和姿态估计。它在无人机自主导航、机器人定位等领域有着广泛应用。为了完全理解VINS-mono的工作原理,建议阅读源代码并参考相关的文献,如《Monocular Visual-Inertial State Estimation With Online Initialization and Camera-IMU Extrinsic Calibration》等。
VINS-mono
詳
細
解
讀
2018-04-15 / VIEWS: 133
VINS-mono
詳
細
解
讀
極
品
巧
克
⼒
前
⾔
Vins-mono
是
⾹
港
科
技
⼤
學
開
源
的
⼀
個
VIO
算
法
,
https://github.com/HKUST-Aerial-Robotics/VINS-Mono
,
是
⽤
緊
耦
合
⽅
法
實
現
的
,
通
過
單
⽬
+IMU
恢
復
出
尺
度
,
效
果
⾮
常
棒
。
感
謝
他
們
開
源
,
我
從
中
學
到
了
⾮
常
多
的
知
識
。
源
碼
總
共
有
15000
多
⾏
,
我
在
通
讀
完
進
程
之
後
,
結
合參
考
⽂
獻
,
把
進
程
背
後
的
算
法
理
論
都
推
導
了
⼀
遍
,
總
結
成
了
本
⽂
,
與
各
位
分
享
。
本
⽂
⽬
標
讀
者
:
對
vins-mono
有
⼀
定
了
解
的
SLAM
算
法
⼯
程
師
。
由
於
進
程
裏
有
⾮
常
多
的
實
現
細
節
,
建
議讀
者
在
讀
本
⽂
前
,
先
讀
⼀
遍
vins-mono
的
進
程
。
1.
特
徵
點
跟
蹤
⾸
先
⽤
cv::goodFeaturesToTrack
在
第
⼀
幀
圖
像
上
⾯
找
最
強
的
150
個
特
徵
點
,
⾮
極
⼤
值
抑
制
半
徑
為
30
。
新
的
特
徵
點
都
有
⾃
⼰
的
新
的
對
應
的
id
。
然
後
在
下⼀
幀
過
來
時
,
對
這
些
特
徵
點
⽤
光
流
法
進
⾏
跟
蹤
,
在
下⼀
幀
上
找
匹
配
點
。
然
後
對
前
後
幀
中
這
些
匹
配
點
進
⾏
校
正
。
先
對
特
徵
點
進
⾏
畸
變
校
正
,
再
投
影
到
以
原
點
為
球
⼼
,
半
徑
為
1
的
球
⾯
上
,
再
延
伸
到
深
度
歸
⼀
化
平
⾯
上
,
獲
得
最
終
校
正
後
的
位
置
。
對
於
每
對
匹
配
點
,
基
於
校
正
後
的
位
置
,
⽤
F
矩
陣
加
ransac
來
篩
選
。
然
後
再
在
匹
配
上
的
特
徵
點
之
外
的
區
域
,
⽤
cv::goodFeaturesToTrack
搜
索
最
強
的
新
的
特
徵
點
,
把
特
徵
點
數
量
補
上
150
個
。
最
後
,
把
剩
下
的
這
些
特
徵
點
,
把
圖
像
點
投
影
回
深
度
歸
⼀
化
平
⾯
上
,
再
畸
變
校
正
,
再
投
影
到
球
⾯
上
,
再
延
伸
到
深
度
歸
⼀
化
平
⾯
上
,
得
到
校
正
後
的
位
置
。
把
校
正
後
的
位
置
發
送
出
去
。
特
徵
點
跟
蹤
和
匹
配
,
就
是
前
⼀
幀
到
這
⼀
幀
的
,
⼀
幀幀
繼
承
下
去
。
或
者
⽣
成
新
的
特
徵
點
。
2.
初
始
化
2.1
外
參
中
的
旋
轉
⽤
機
器
⼈
⼿
眼
標
定
的
⽅
法
,
計
算
出
外
參
中
的
旋
轉
。
其
中
是
陀
螺
儀
預
積
分
得
到
的
,
是
⽤
8
點
法
對
前
後
幀
對
應
的
特
徵
點
進
⾏
計
算
得
到
的
。
詳
細
⾒
《
Monocular Visual-Inertial State Estimation With Online
Initialization and Camera-IMU Extrinsic Calibration
》。
2.2 SFM
先
在
關
鍵
幀
窗
⼝
裏
⾯
,
找
到
第
l
幀
,
第
l
幀
與
最
後
⼀
幀
有
⾜
夠
的
像
素
位
移
,
並且
能
⽤
8
點
法
算
出
旋
轉
和
位
移
。
以
l
幀
的
姿
態
為
世
界
座
標
系
。
先
從
l
幀
開
始
與
最
後
⼀
幀
進
⾏
三
⻆
定
位
,
再
⽤
pnp
估
計
出
下⼀
幀
的
位
姿
,
下⼀
幀
再
與
最
後
⼀
幀
三
⻆
定

剩余16页未读,继续阅读
2021-01-02 上传
2020-08-12 上传
162 浏览量
2022-08-03 上传
168 浏览量
视觉SLAM之VINS-Mono:基于紧耦合VIO状态估计的全面解决方案,含安装配置、编译运行指南、中文注释代码及思维导图,视觉SLAM之VINS-Mono , VINS-Mono是基于紧耦合的VIO
2025-01-23 上传
104 浏览量
2023-09-07 上传
118 浏览量
视觉SLAM之VINS-Mono详解:紧耦合VIO状态估计、环境配置、运行文档及思维导图附开源ROS数据包,视觉SLAM之VINS-Mono:基于紧耦合的VIO状态估计的实用解决方案,附安装配置、编译
2025-02-24 上传
134 浏览量
2023-10-24 上传
2018-12-20 上传
199 浏览量
154 浏览量
2024-07-12 上传
2022-08-03 上传
视觉SLAM之VINS-Mono , VINS-Mono是基于紧耦合的VIO状态估计,也是近年来较为成熟且可落地的视觉SLAM解决方案,本提供: 安装环境配置文档及编译运行文档,附带可测试的开源ROS
152 浏览量
113 浏览量
2024-08-16 上传
2021-06-08 上传
152 浏览量
139 浏览量
资源评论


永远的12
- 粉丝: 1115
- 资源: 321









最新资源
- 西门子数控系统调试与通讯:828D、840D、808D的参数配置、梯形图修改及外部IO增加案例分享,西门子数控系统调试与配置手册:涉及828D、840D与808D系统的参数调整、梯形图修改与外部通讯实
- 中国各类互联网应用的用户规模数据.zip
- 中国各省地图(包含港澳台) 山西(shanxi)陕西(shanxi1)
- E000620医院体检医疗健康类网站模板+PHP+Mysql+响应式+CMS+建站模板
- 中国各省对应各市级地图json
- 大模型基础-30分钟一文了解大模型基础知识(人工智能必读).zip
- COMSOL模拟:二氧化碳充装与输气管道泄漏的耦合温度场分析,输出速度与温度分布,COMSOL模拟:二氧化碳充装与输气管道泄漏的耦合温度场分析,输出速度与温度分布,comsol 二氧化碳充装二氧化碳输
- 基于python开发的简单的windows桌面画笔功能,全部使用快捷键操作(python源码+图文教程),开箱即用,非常优质的资源
- C#上位机与西门子PLC通讯教程:数据读取存储、报表生成、报警历史查询及变量自定义配置实战案例详解,C#上位机与西门子PLC通讯教程:数据读取存储、报表生成、报警历史查询及变量自定义配置实战案例详解
- 基于遗传算法的锂电池二阶RC模型参数辨识技术研究-附Matlab程序与多种工况充放电数据集(DST、FUDs、US06、BJDST等八种),基于遗传算法的锂电池二阶RC模型参数辨识技术研究-附Ma
- 利用格子玻尔兹曼方法LBM D1Q3模型在Matlab中模拟一维扩散方程的研究,使用格子玻尔兹曼方法LBM D1Q3模拟一维扩散方程的Matlab实现与应用研究,使用格子玻尔兹曼方法LBM D1Q3模
- 流水线电机变频调速系统设计 MATLAB电路建模仿真
- 2022年美国各州基本经济统计数据.zip
- 基于Transformer的Matlab代码:数据回归与多场景预测工具箱,Transformer在数据回归分析中的应用-基于Matlab代码的实战教学,Transformer回归 Matlab代码
- Sigma-Delta ADC Matlab模型集合:包含CTSD调制器、FFT分析、动态静态特性仿真与教程,方便入门学习,Continuous-Time Sigma-Delta ADC Matlab
- 基于Comsol仿真的兰姆波导波在钢板中的传播及裂隙检测分析,Comsol仿真中兰姆波导波在有限尺寸钢板内传播的裂隙检测技术研究,Comsol仿真无损检测时产生的兰姆波 导波在宽度和厚度有限的钢板中传
