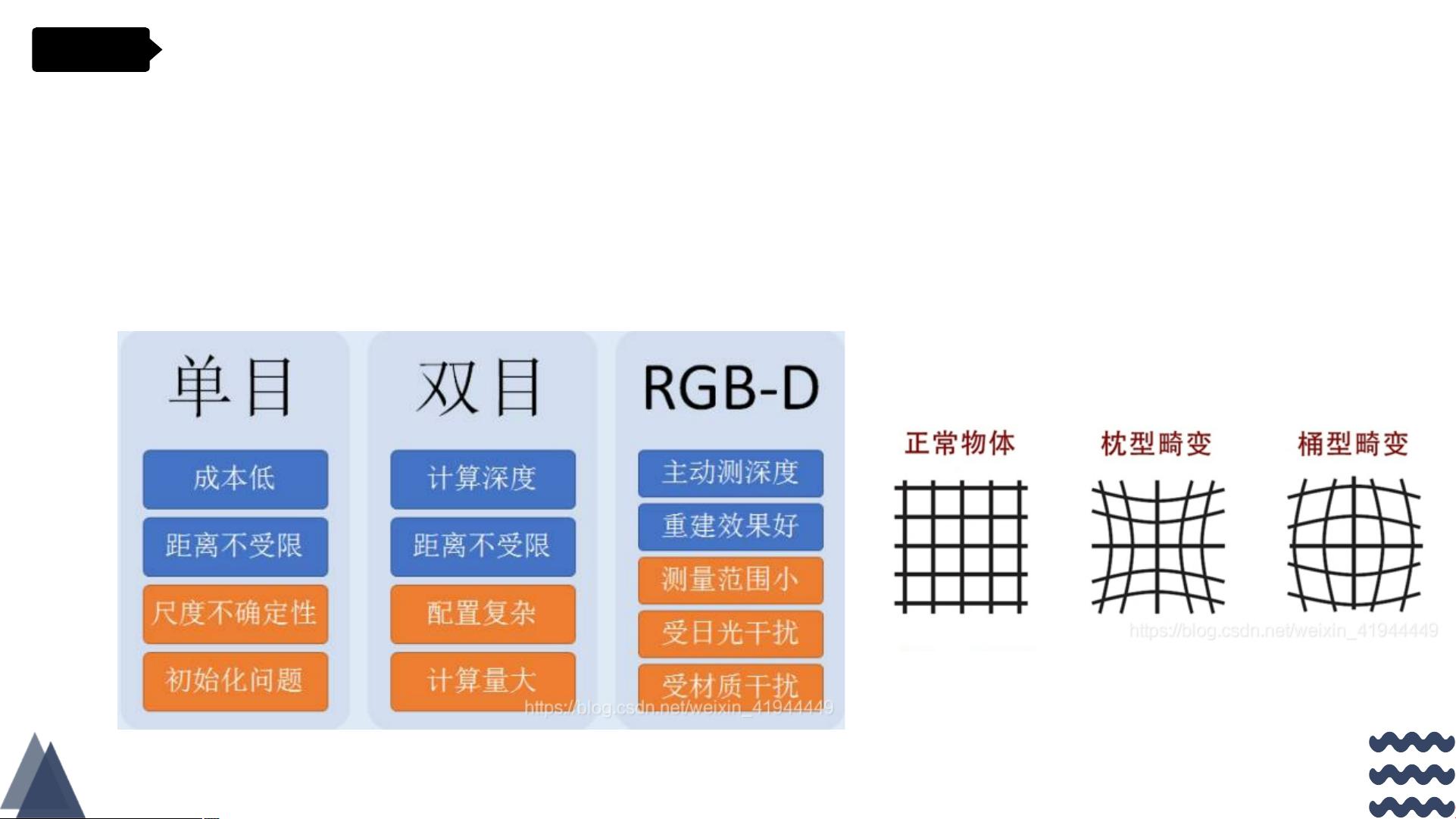
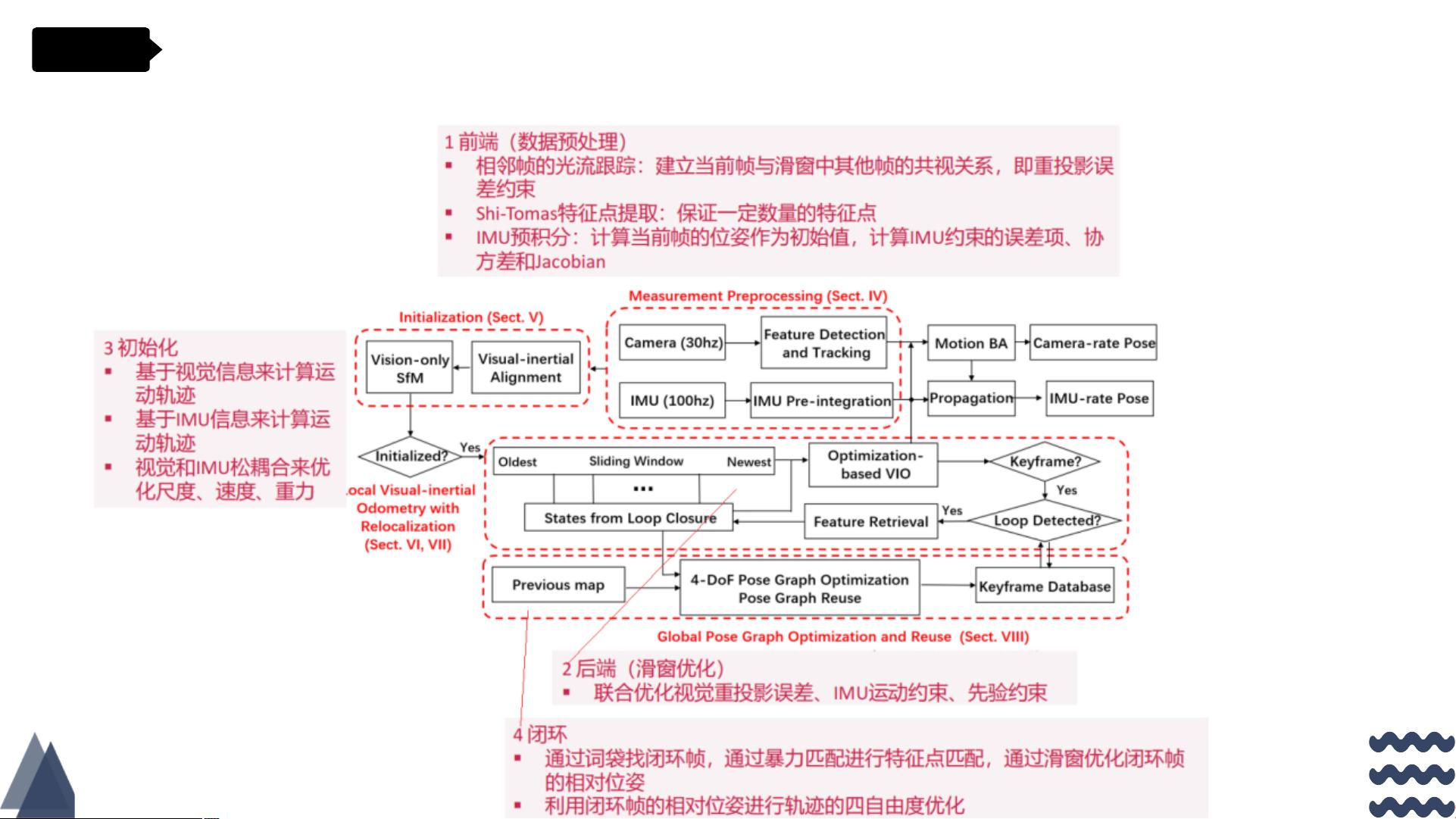
VSLAM 和 VINS-Mono 框架介绍 VSLAM(Visual Simultaneous Localization and Mapping)即视觉同时定位和建图,是指如何使用相机解决定位和建图问题。当使用相机作为传感器时,我们需要根据一系列连续运动的图像,从中推断相机的运动以及周围环境的情况。 VSLAM 框架可以分为前端和后端两个部分。前端负责传感器数据预处理,包括摄像头和惯性测量单元(IMU)等 sensor 数据的处理。后端负责视觉约束、IMU 约束和滑窗优化等步骤。 VINS-Mono 框架是 VSLAM 框架的一种实现,它主要由前端和后端两个部分组成。前端包括光流跟踪、光流金字塔、读取图像、IMU 预积分等步骤。后端包括视觉约束、IMU 约束、简化的 VINS 和滑窗优化等步骤。 光流跟踪是 VINS-Mono 框架中的一种关键技术,它可以追踪图像中某个点的运动。光流可以分为稀疏光流和稠密光流两种,稀疏光流使用 Lucas-Kanade(LK)算法,而稠密光流使用 Horn-Schunck(HS)算法。灰度不变假设是光流跟踪的基本假设,它认为图像的灰度值不变。 在 VINS-Mono 框架中,前端还包括光流金字塔、读取图像、IMU 预积分等步骤。光流金字塔是将图像金字塔化,以提高光流跟踪的效率。读取图像是从图像中读取数据,而 IMU 预积分是对 IMU 数据进行预处理。 后端包括视觉约束、IMU 约束、简化的 VINS 和滑窗优化等步骤。视觉约束是根据视觉数据计算相机的运动,而 IMU 约束是根据 IMU 数据计算相机的运动。简化的 VINS 是对 VINS-Mono 框架的简化实现,而滑窗优化是对相机运动的优化。 VSLAM 和 VINS-Mono 框架是解决视觉同时定位和建图问题的重要技术,它们可以广泛应用于机器人、自动驾驶、增强现实等领域。
剩余21页未读,继续阅读
评论星级较低,若资源使用遇到问题可联系上传者,3个工作日内问题未解决可申请退款~