交流伺服运动控制系统建模、控制系统设计仿真方法
本文将详细介绍交流伺服运动控制系统的建模、控制系统设计仿真方法。该系统是由多个典型环节组成的,包括纯微分环节、积分环节、惯性环节、振荡环节等。这些环节可以组合成不同的系统,例如双闭环调速系统。
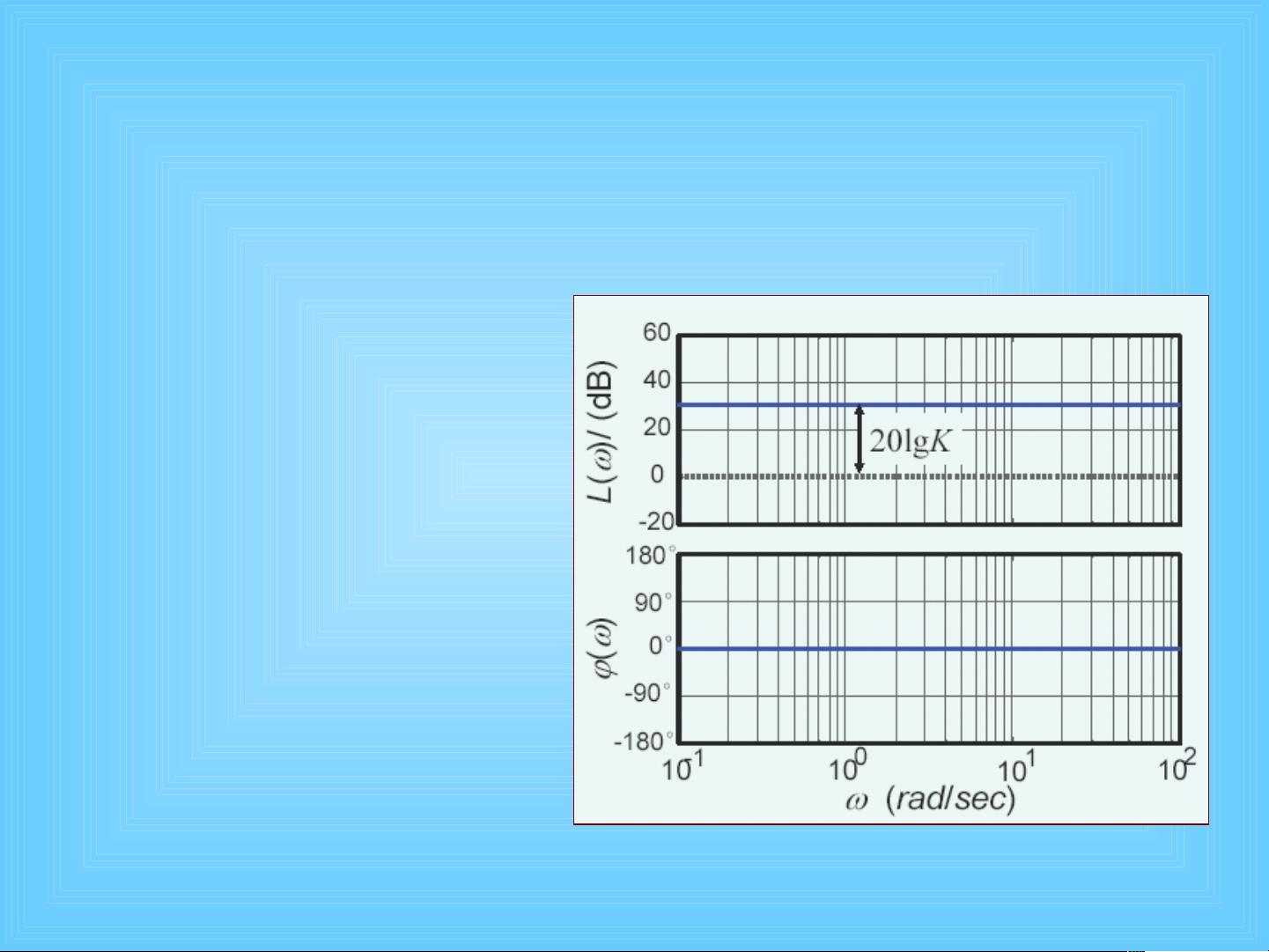
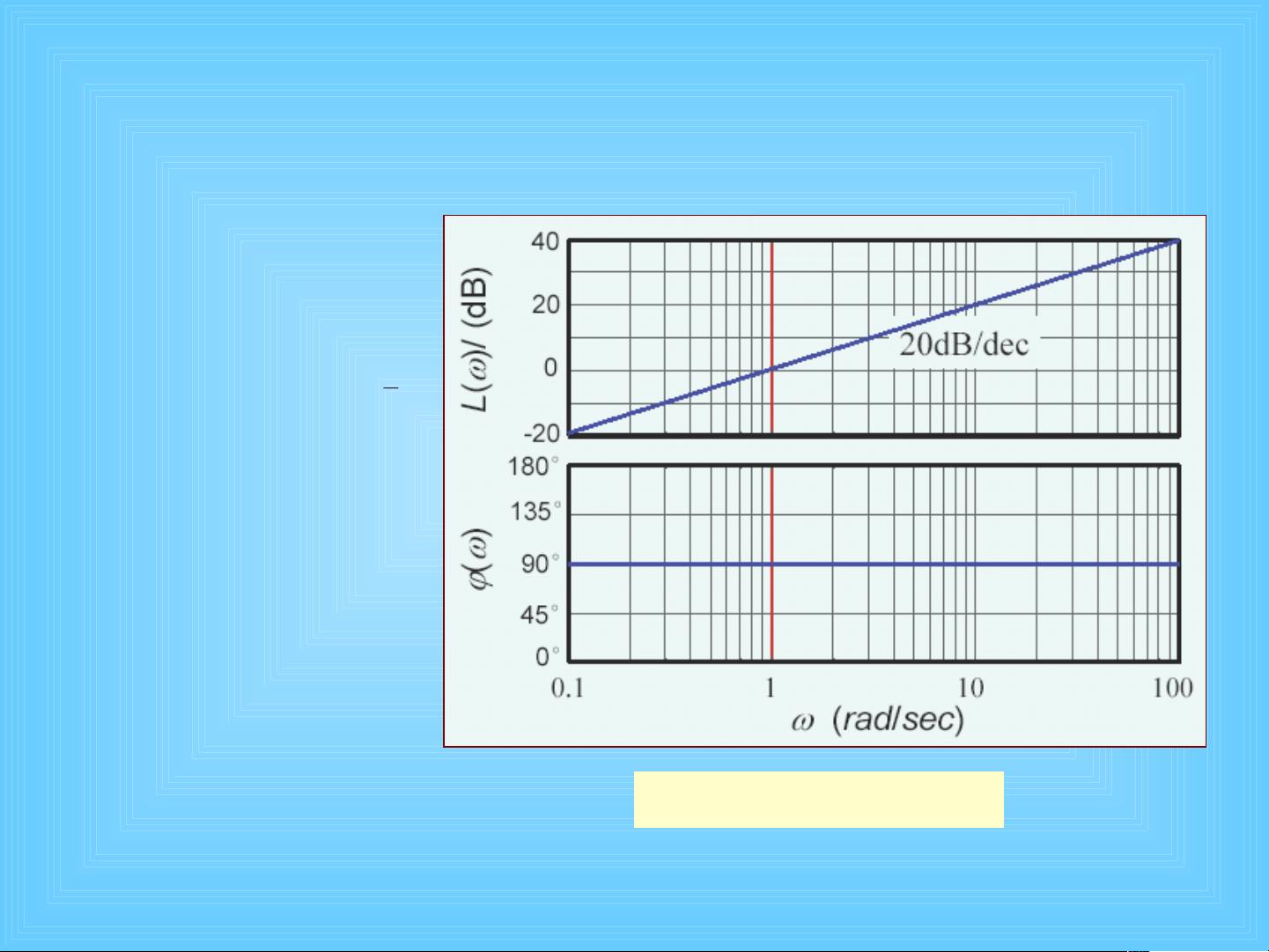
首先, lets 看看纯微分环节的对数频率特性。当K>1时,分贝数为正;当K<1时,分贝数为负。幅频曲线升高或降低相频曲线不变K)j(GKlg20|)(L0)(改变K积分环节对数频率特性2je1j1)j(Glg20)(L90)(0|lg20|)(L11( )KG ss
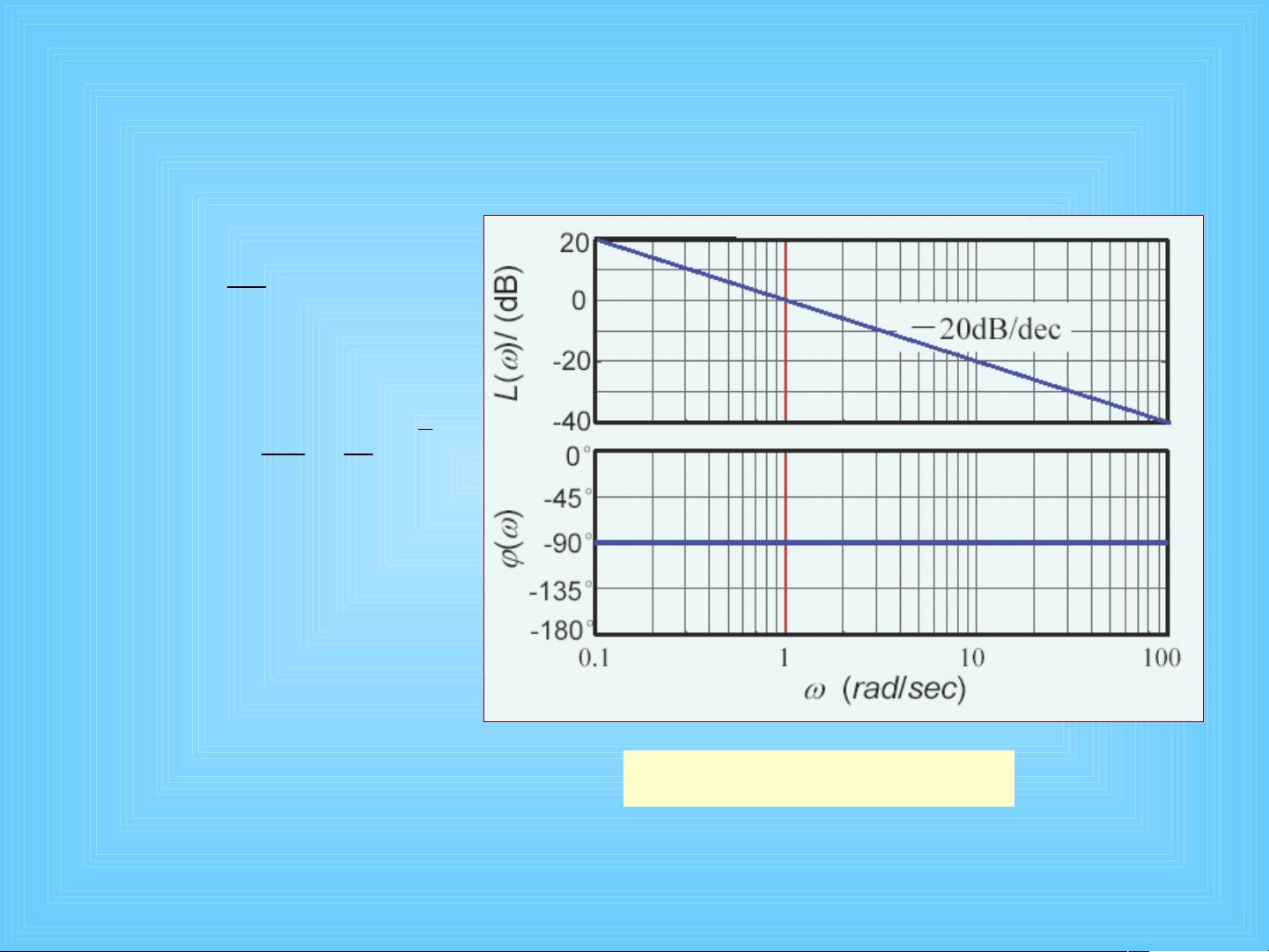
其次, lets 看看积分环节的对数频率特性。当K>1时,分贝数为正;当K<1时,分贝数为负。幅频曲线升高或降低相频曲线不变K)j(GKlg20|)(L0)(改变K纯微分环节对数频率特性je1j1)j(Glg20)(L90)(0|lg20|)(L11( )GsKs
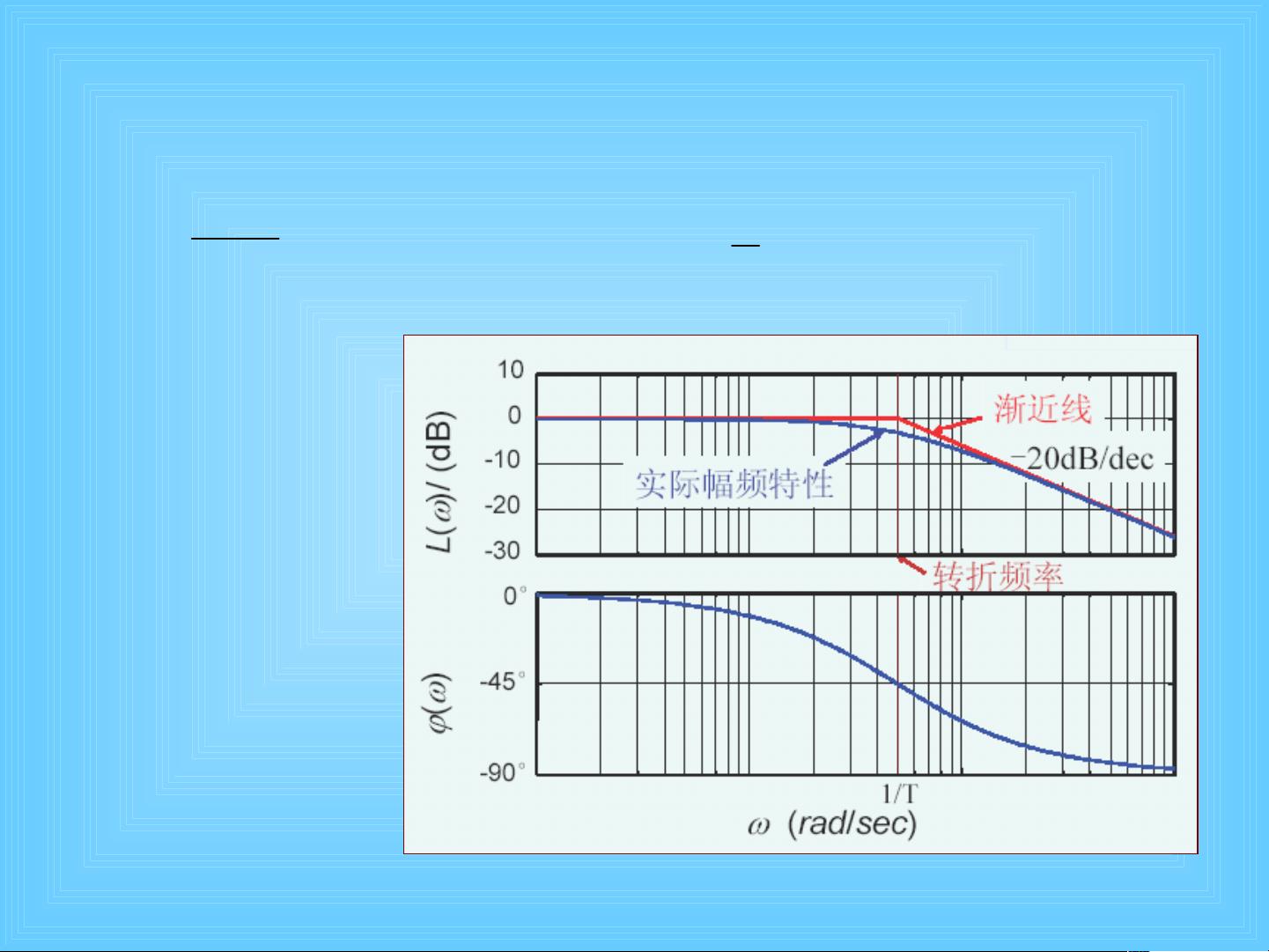
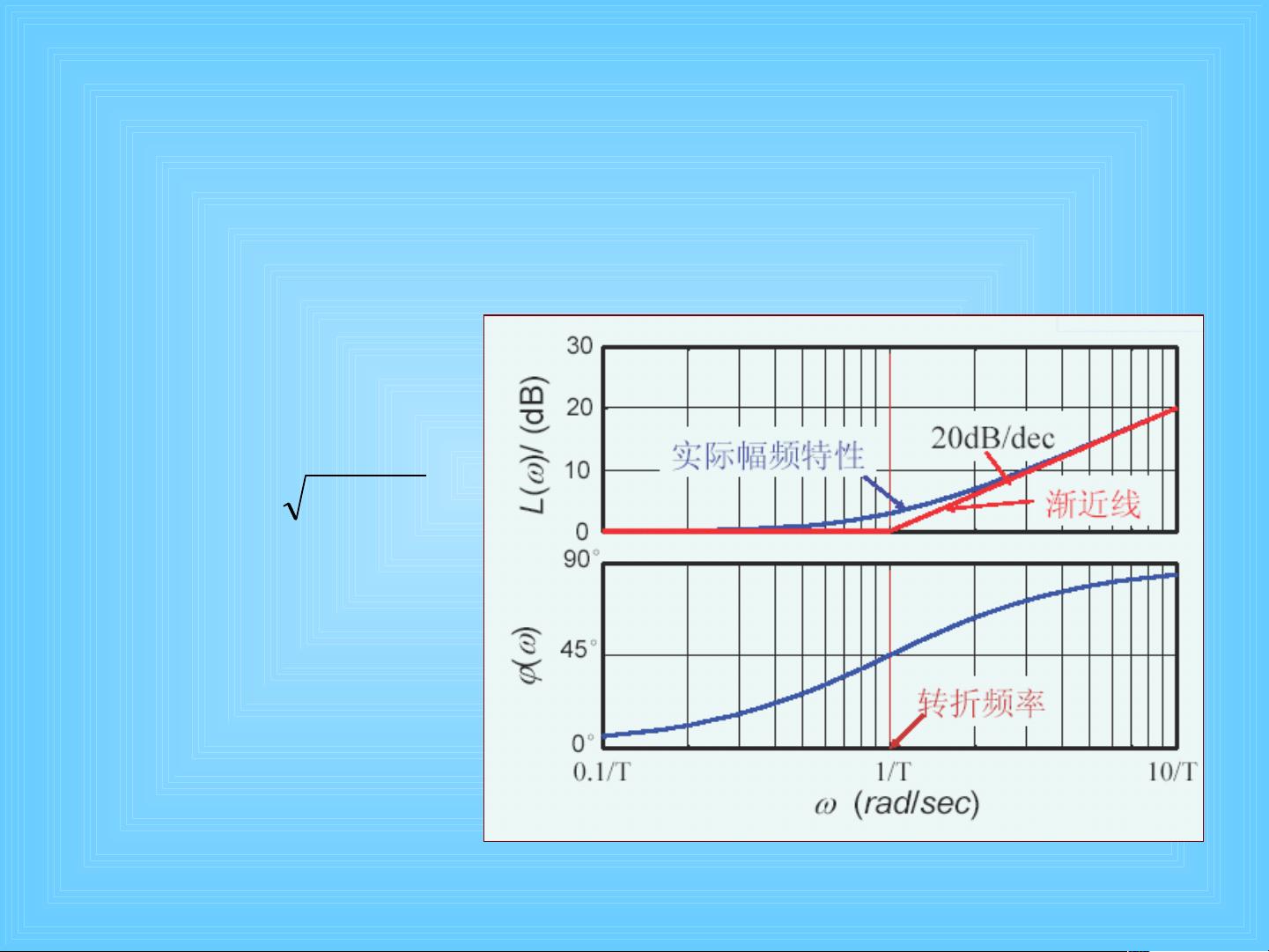
再次,让我们看一下惯性环节的对数频率特性。幅频曲线升高或降低相频曲线不变K)j(GKlg20|)(L0)(改变K振荡环节对数频率特性2je1j1)j(Glg20)(L90)(0|lg20|)(L11( )KG ss
现在,让我们讨论一下双闭环调速系统的结构及分析。双闭环调速系统由两个闭环组成,即内环电流环和外环转速环。电流环的输出作为转速环的输入,转速环的输出则控制电力电子变换器UPE。
在设计双闭环调速系统时,需要考虑到动态抗扰性能分析。动态抗扰性能是双闭环调速系统的重要性能指标之一。对于双闭环调速系统,抗负载扰动和抗电网电压扰动的性能是非常重要的。
在双闭环调速系统中,转速调节器ASR和电流调节器ACR分别对应于外环转速环和内环电流环。转速调节器ASR的作用是使转速n很快地跟随给定电压变化,稳态时可减小转速误差。如果采用PI调节器,则可实现无静差。电流调节器ACR的作用是使电流紧紧跟随其给定电压(即外环调节器的输出量)变化。
最后,让我们讨论一下双闭环调速系统的工程设计方法。设计双闭环调速系统需要同时解决稳、准、快、抗干扰等各方面相互有矛盾的静、动态性能要求,需要设计者有扎实的理论基础和丰富的实践经验。
本文对交流伺服运动控制系统的建模、控制系统设计仿真方法进行了详细的介绍。双闭环调速系统是交流伺服运动控制系统的重要组成部分,对其设计和分析具有重要的理论和实践价值。


















评论0