
武汉大学测绘学院
Matlab
相机标定工具箱实验
(Camera Calibration Toolbox for Matlab)
Hu Yulei @sgg.whu 2012.11.12
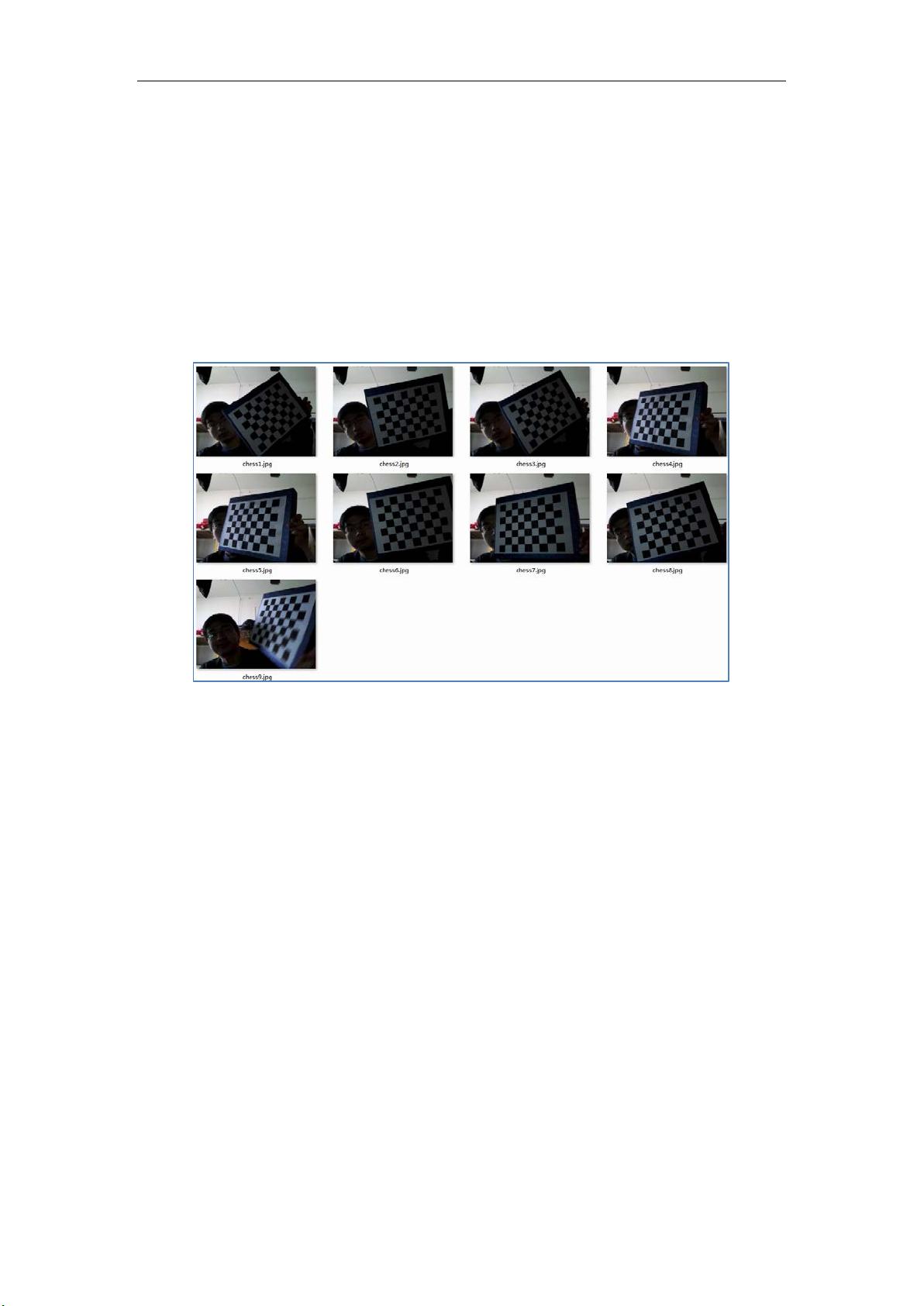
一、原始数据
image 文件夹下的 9 张影像(以前做相机标定时用笔记本摄像头采集的数据)
1600pixel*1200pixel
二、实验过程
1、安装工具箱
下载相机标定工具箱(Camera Calibration Toolbox for Matlab),并加载到系统路径。
http://www.vision.caltech.edu/bouguetj/calib_doc/#start
2、读入影像
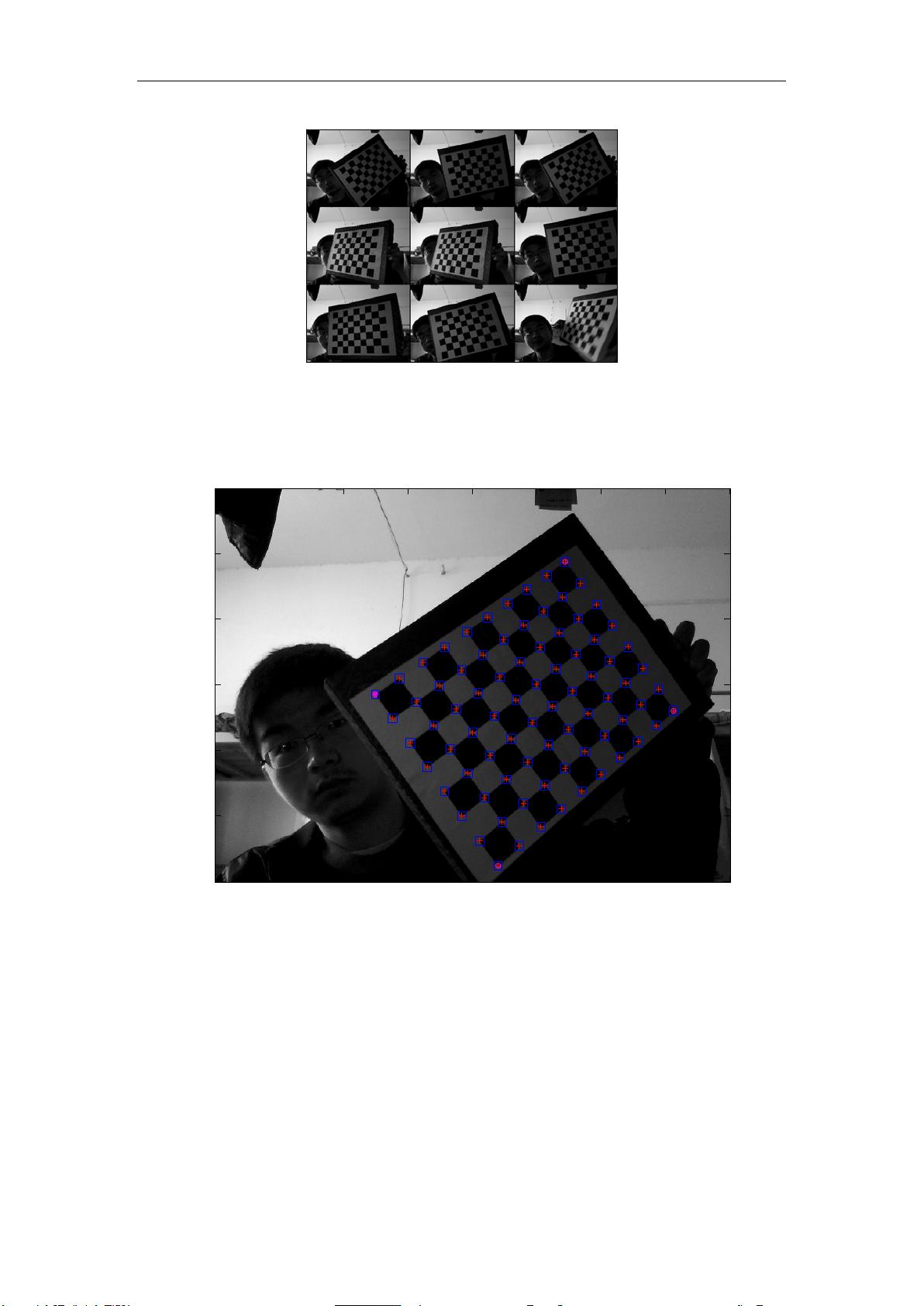
剩余8页未读,继续阅读


jadesl13
- 粉丝: 70
- 资源: 16









最新资源
- 10、安徽省大学生学科和技能竞赛A、B类项目列表(2019年版).xlsx
- 9、教育主管部门公布学科竞赛(2015版)-方喻飞
- C语言-leetcode题解之83-remove-duplicates-from-sorted-list.c
- C语言-leetcode题解之79-word-search.c
- C语言-leetcode题解之78-subsets.c
- C语言-leetcode题解之75-sort-colors.c
- C语言-leetcode题解之74-search-a-2d-matrix.c
- C语言-leetcode题解之73-set-matrix-zeroes.c
- 树莓派物联网智能家居基础教程
- YOLOv5深度学习目标检测基础教程
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



- 1
- 2
- 3
- 4
- 5
- 6
前往页