

目录
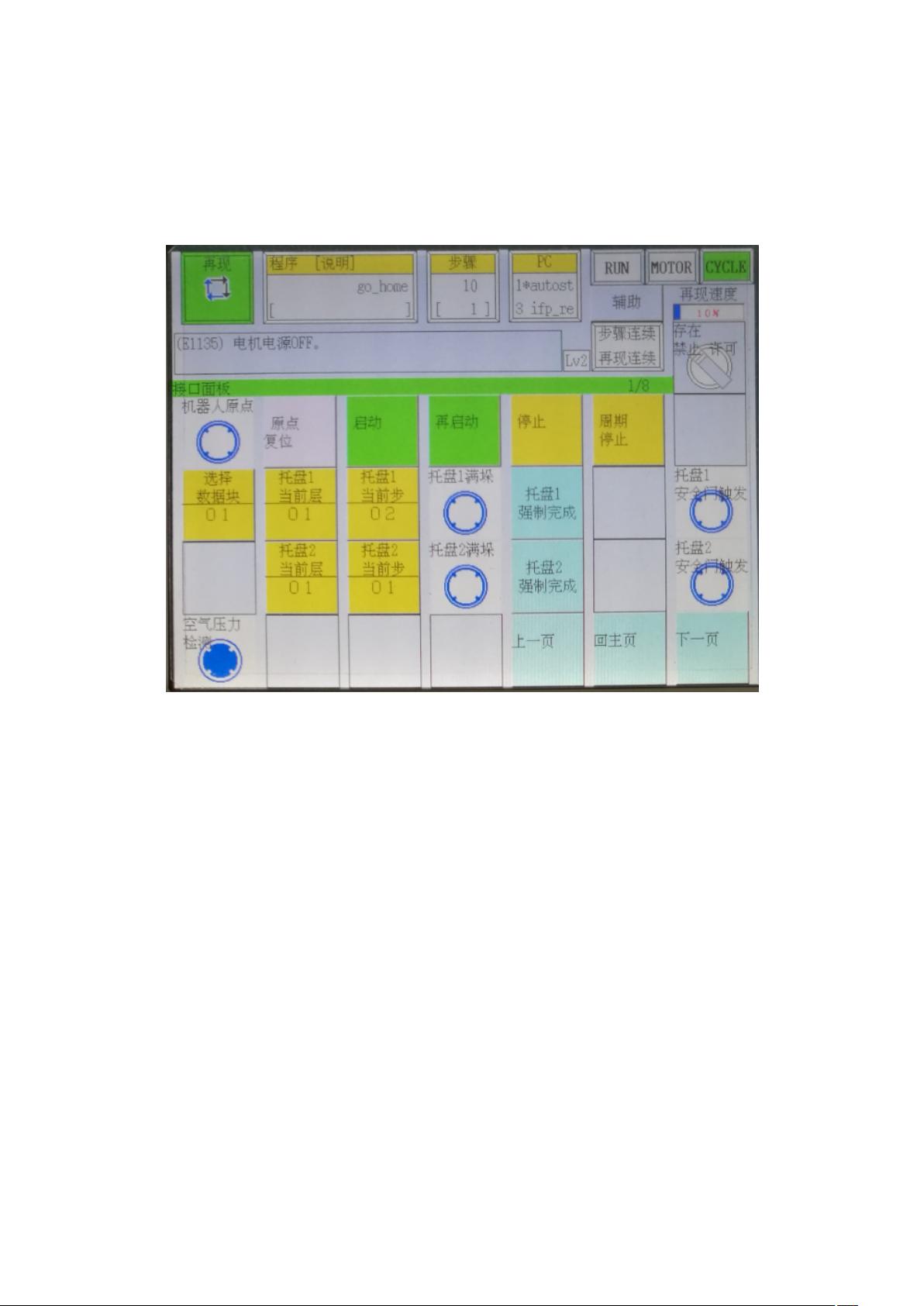
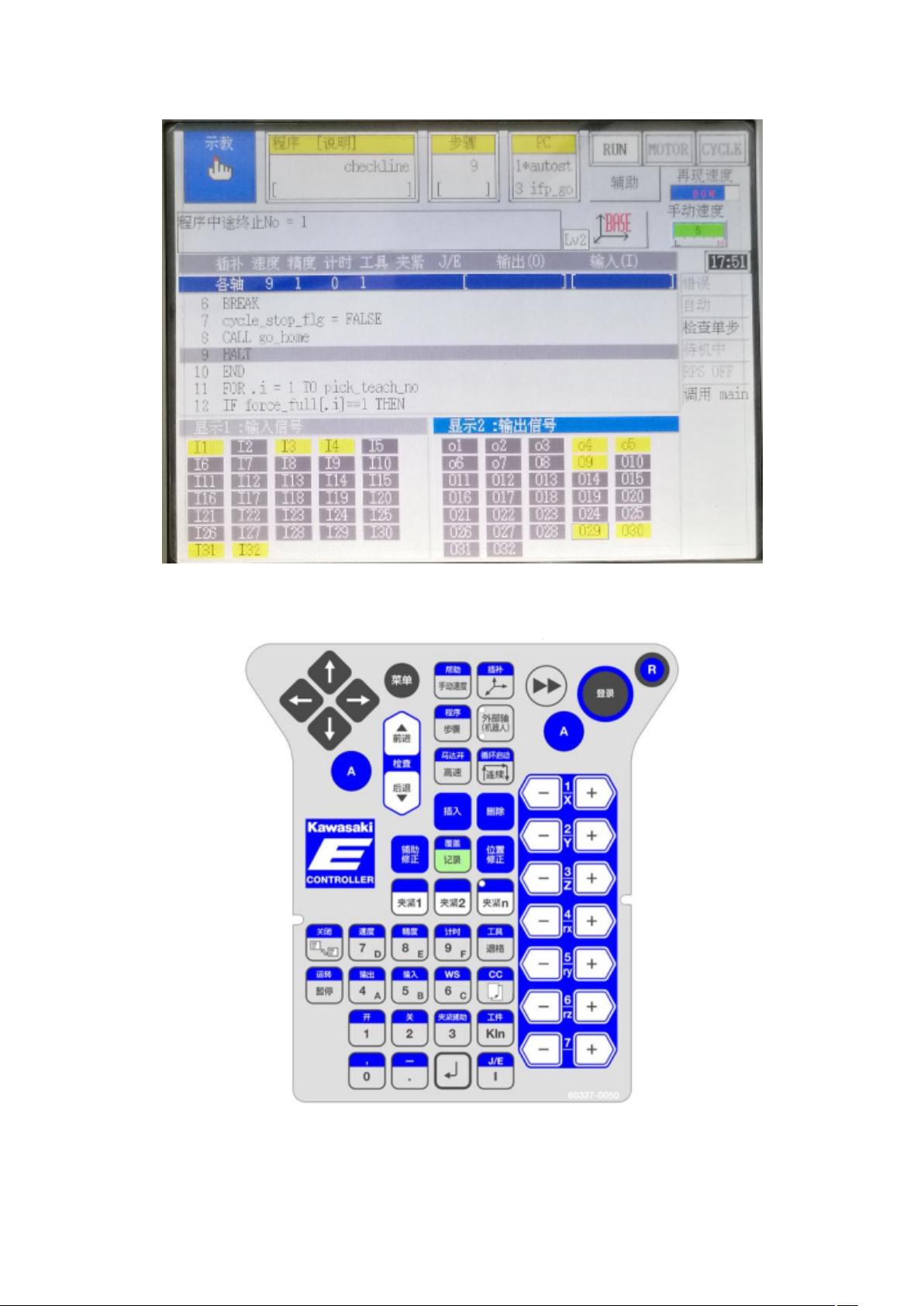
示教器主界面 ..................................................................................................................................2
如何在接口面板和程序窗口之间切换...........................................................................................5
接口面板有几页,如何翻页 ..........................................................................................................6
如何切换手动模式和自动模式 ......................................................................................................6
如何手动移动机器人 ......................................................................................................................7
如何示教位置 ..................................................................................................................................8
如何将机器人移动至抓取点或已示教的点.................................................................................12
如何查看机器人输入输出 IO 状态...............................................................................................13
如何手动控制抓手打开合上 ........................................................................................................14
剩余15页未读,继续阅读
资源评论


老帽爬新坡
- 粉丝: 98
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- chromedriver-linux64_117.0.5920.0.zip
- chromedriver-linux64_117.0.5922.0.zip
- chromedriver-linux64_117.0.5922.2.zip
- chromedriver-linux64_117.0.5923.0.zip
- chromedriver-linux64_117.0.5924.2.zip
- chromedriver-linux64_117.0.5925.0.zip
- chromedriver-linux64_117.0.5926.0.zip
- 机械设计板栗去皮机sw16可编辑全套技术资料100%好用.zip
- 提交给美国劳工部(DOL)的H1B签证申请中劳动条件申请(LCA)披露的全面记录,签证申请记录数据
- STM32F407 使用标准库和硬件SPI的方式读写SD卡
- 双极式控制直流可逆调速系统matlab仿真 控制良好,看图 双极式控制直流pwm-m可逆调速系统建模与仿真 (1)整流器采用两相桥臂,pwm驱动,spwm (2)采用双闭环控制,转速外环ASR与电
- 用数字电路软件实现2位的复用器
- mmc模块化多电平逆变器最近电平逼近23电平仿真 双闭环控制,电容电压平衡控制,环流抑制控制 简易模型,供学习参考
- 2023年江苏省中职网络搭建与应用技能大赛赛项技能要求详析
- 一个Python 爬虫程序实例,用于爬取豆瓣电影 Top250 的电影名称、评分和评价人数
- 基于Qt的ZUT百事通系统、数据结构课设,使用c++Qt完成、软件架构说明:C/S架构、安装教程 1. 将客户端zip文件解压,打开Qt构建 2. 服务端直接打开cmakelist
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


