
实验三 基于 Matlab 的纯滞后控制系统设计
一、实验目的
1) 学习使用 simulink 进行 Smith 预估补偿控制的设计方法。
2) 学习使用 simulink 实现 Dahlin 算法的设计方法。
二、实验原理
1. Smith 预估补偿控制的设计
已知被控对象传递函数:
(1)
应用 Smith 预估补偿算法设计控制系统,并采用 PID 控制。原理图参见课本 P127 图 4-21 和
P128 图 4-22。
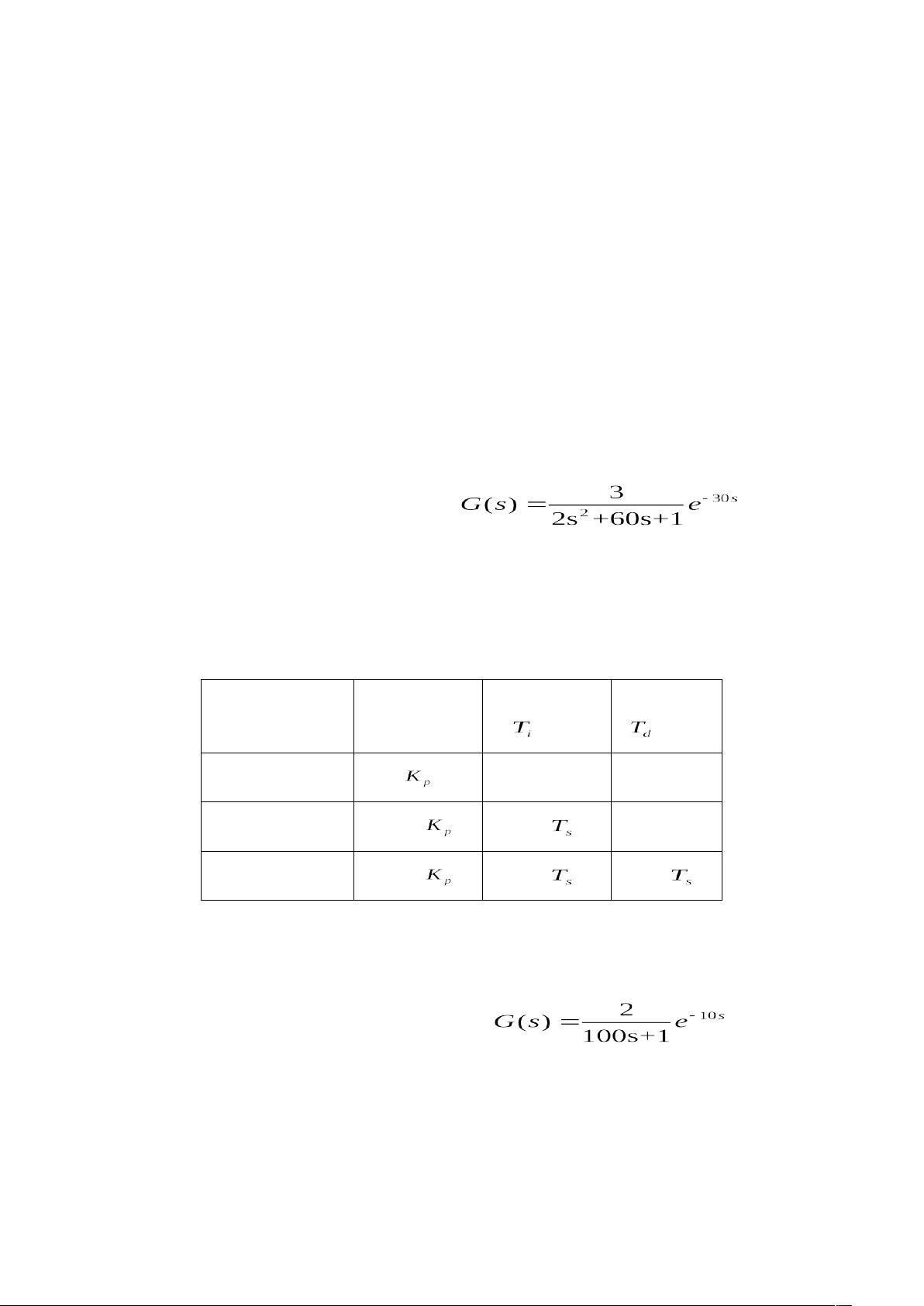
表 1 衰减曲线法整定控制器参数经验公式
控制规律 增益 积分时间
(min)
微分时间
(min)
P
PI
0.83 0.5
PID
1.25 0.3 0.1
2. Dahlin 算法的设计
已知被控对象传递函数:
(2)
采样周期为 2s,选择期望闭环传递函数中的时间常数分别为 T
τ
=5s,10s,20s,设计 Dahlin
控制器。原理图参见课本 P129 4.3.2 小节。
三、实验内容






评论0
最新资源