
RoboMaster
⼯
程
师
移
动
机
器
⼈
软
件
框
架构
思
对
于
软
件
系
统
设计
⽽
⾔
,
我
们
⼀
点
经
验
都
没
有
,
刚
开
始
的
时
候
根
本
⽆
从
下
⼿
,
看
了
很
多
开
源
框
架
、
PPT
后
就
开
始
慢
慢
着
⼿
了
。
这
个
阶
段
的
思
想
⾄
关
重
要
,
最
后
框
架
的
样
⼦
完
全
由
你
这
个
阶
段
的
思
想
决
定
。
从
11
⽉
份
到
1
⽉
下
旬
,
我
们
花
了
两个
半
⽉
的
时
间
来
搭
⾃
动
⻋
的
软
件
框
架
,
除
了
通
信
以
外
,
基
本
完
成
了
⾃
动
机
器
⼈
软
件
系
统
框
架
的
搭
建
与
算
法
的
重
构
,
项
⽬
代
码
⻅
RoboRTS
和
RoboRTS-Firmware
,
其
中
RoboRTS
运
⾏
在
on-board
computer
上
,
主
要
实
现
了
Driver
、
Perception
、
Decision-Making
、
Planning
部
分
,
RoboRTS-Frimware
运
⾏
在
MCU
上
,
主
要
实
现
Control
部
分
。
下
⾯
主
要
谈
⼀下
RoboRTS
是
实
现
思
路
,
能
⼒
有
限
,
欢
迎
批
评
指
正
〜
⽂
件
⽬
录
如
果
⽂
件
⽬
录
前
期
没
有
定
好
,
后
期
添
加
新
feature
的
时
候
就
会
显
得
⾮
常
乱
、
思
路
不
清
晰
,
导
致
同
事
或
⽤
户
难
以
理
解
。
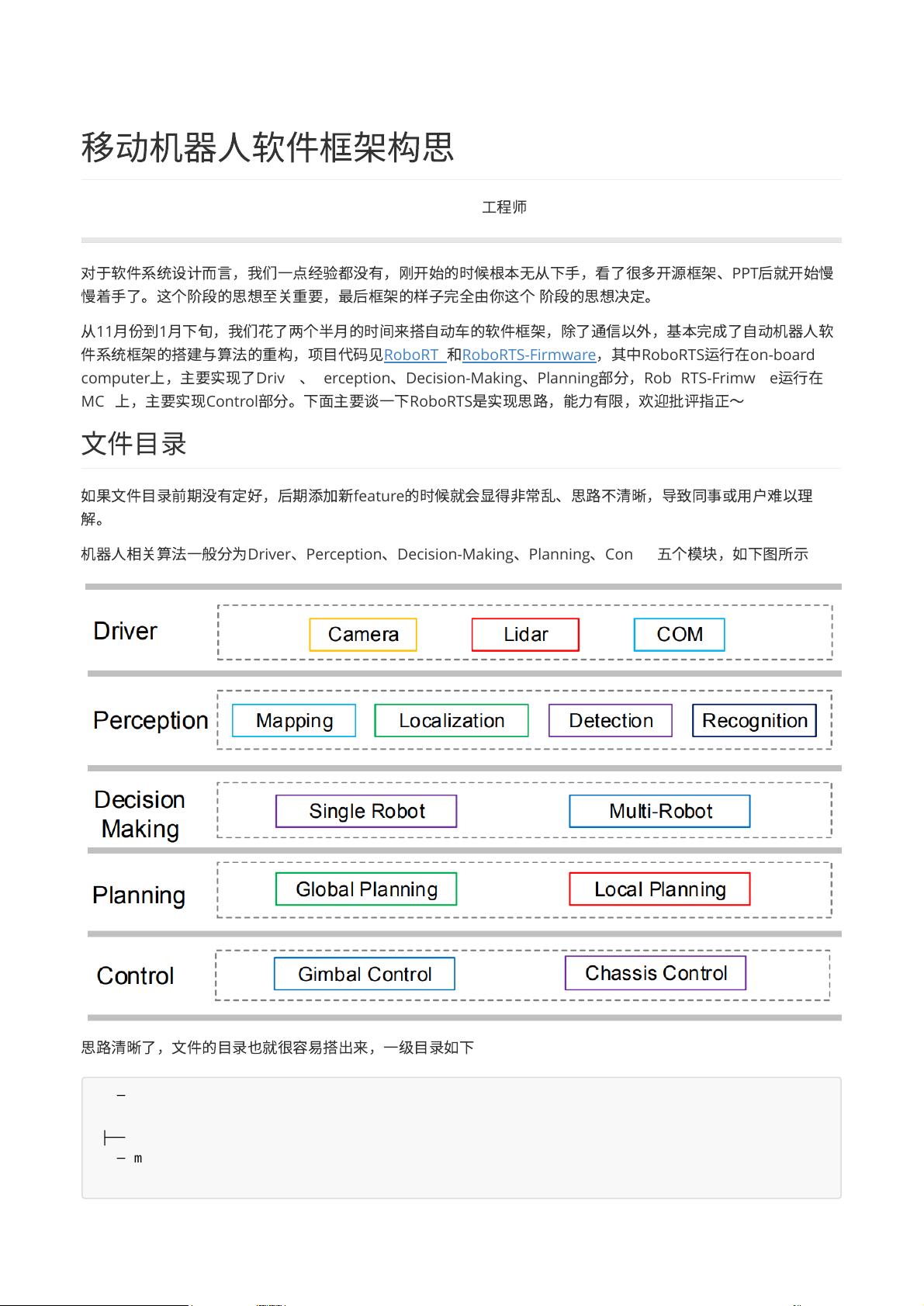
机
器
⼈
相
关
算
法
⼀
般
分
为
Driver
、
Perception
、
Decision-Making
、
Planning
、
Control
五
个
模
块
,
如
下
图
所
⽰
思
路
清
晰
了
,
⽂
件
的⽬
录
也
就
很
容
易
搭
出
来
,
⼀
级
⽬
录
如
下
├── cmake
├── common
├── docs
├── modules
└── tools
剩余6页未读,继续阅读
资源评论













