
算法一:A*寻路初探
译者序:很久以前就知道了 算法,但是从未认真读过相关的文章,也没有看过代码,只是脑子里
有个模糊的概念。这次决定从头开始,研究一下这个被人推崇备至的简单方法,作为学习人工智能的开
始。
这篇文章非常知名,国内应该有不少人翻译过它,我没有查找,觉得翻译本身也是对自身英文水平的锻
炼。经过努力,终于完成了文档,也明白的 算法的原理。毫无疑问,作者用形象的描述,简洁诙谐的
语言由浅入深的讲述了这一神奇的算法,相信每个读过的人都会对此有所认识。
原文链接:
以下是翻译的正文。由于本人使用 编辑,所以没有对原文中的各种链接加以处理除了图表,
也是为了避免未经许可链接的嫌疑,有兴趣的读者可以参考原文。
会者不难,A*(念作 A 星)算法对初学者来说的确有些难度。
这篇文章并不试图对这个话题作权威的陈述。取而代之的是,它只是描述算法的原理,使你可以在
进一步的阅读中理解其他相关的资料。
最后,这篇文章没有程序细节。你尽可以用任意的计算机程序语言实现它。如你所愿,我在文章的
末尾包含了一个指向例子程序的链接。 压缩包包括 和 ! 两个语言的版本,如果你只是想
看看它的运行效果,里面还包含了可执行文件。我们正在提高自己。让我们从头开始。。。
序:搜索区域
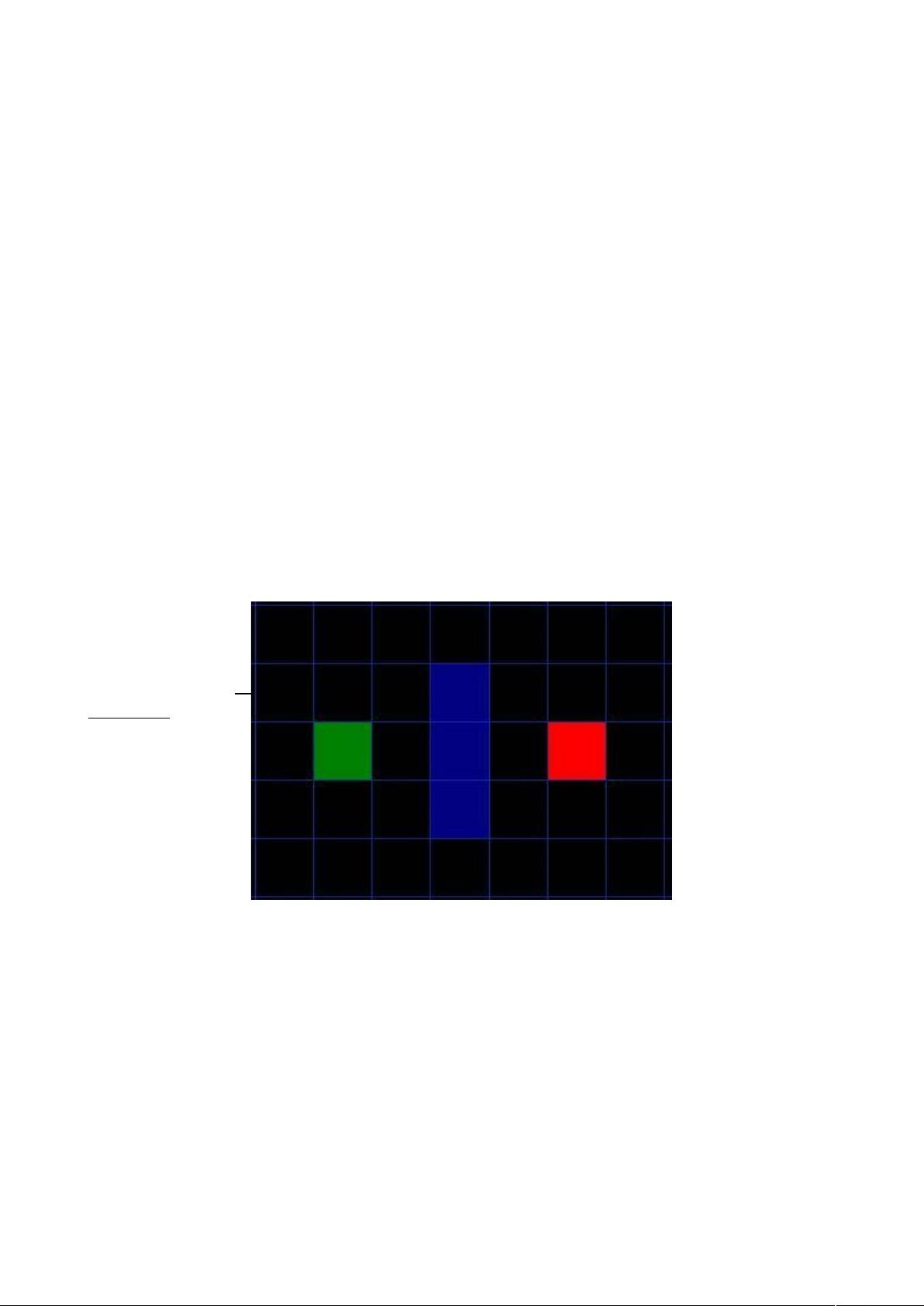
假设有人想从 点移动到一墙之隔的 点,如图,绿色的是起点 ,红色是终点 ,蓝色方块是中间的
墙。
!"图 #$
!!!!你首先注意到,搜
索区域被我们划分成了
方形网格。像这样,简
化搜索区域,是寻路的
第一步。这一方法把搜
索区域简化成了一个二
维数组。数组的每一个
元素是网格的一个方块,
方块被标记为可通过的
和不可通过的。路径被
描述为从 到 我们
经过的方块的集合。一
旦路径被找到,我们的人就从一个方格的中心走向另一个,直到到达目的地。
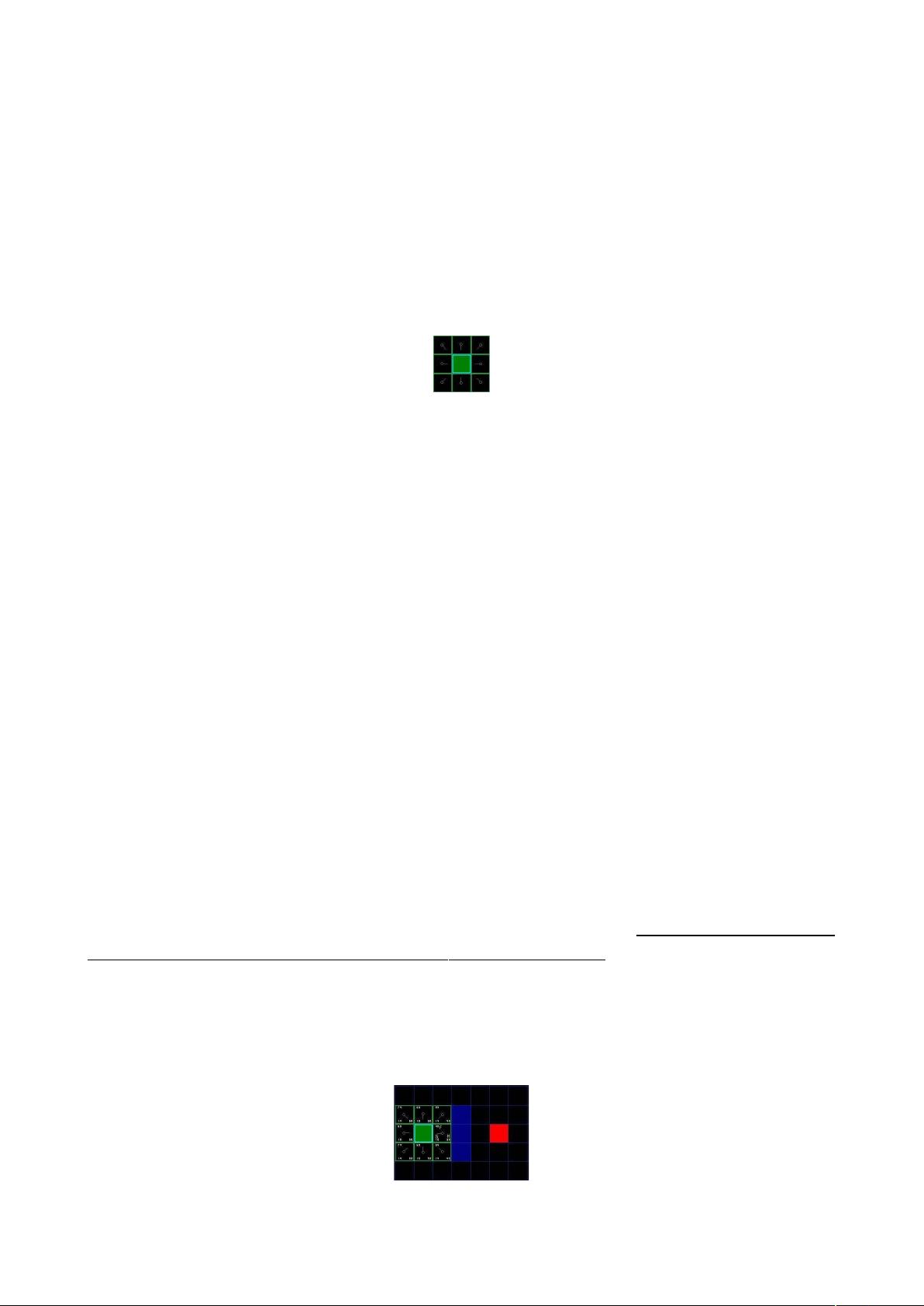
这些中点被称为“节点”。当你阅读其他的寻路资料时,你将经常会看到人们讨论节点。为什么不把他
们描述为方格呢?因为有可能你的路径被分割成其他不是方格的结构。他们完全可以是矩形,六角形,
或者其他任意形状。节点能够被放置在形状的任意位置-可以在中心,或者沿着边界,或 其他什么地方 。
我们使用这种系统,无论如何,因为它是最简单的。
开始搜索
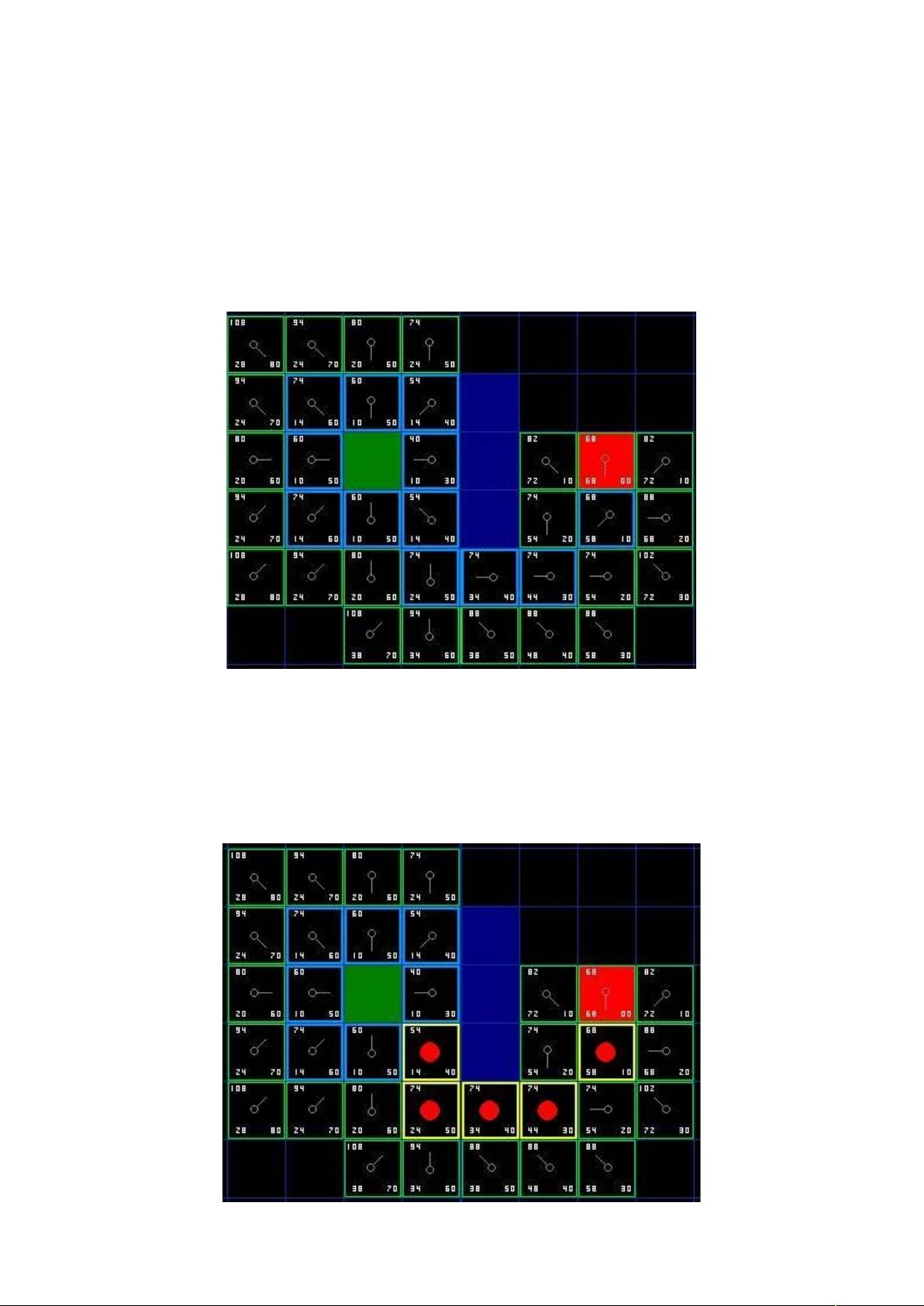
正如我们处理上图网格的方法,一旦搜索区域被转化为容易处理的节点,下一步就是去引导一次找
到最短路径的搜索。在 寻路算法中,我们通过从点 开始,检查相邻方格的方式,向外扩展直到找到
目标。
我们做如下操作开始搜索:

剩余22页未读,继续阅读
资源评论


噬灬魂
- 粉丝: 0
- 资源: 1









最新资源
- 光储并网VSG系统Matlab simulink仿真模型,附参考文献 系统前级直流部分包括光伏阵列、变器、储能系统和双向dcdc变器,后级交流子系统包括逆变器LC滤波器,交流负载 光储并网VSG系
- file_241223_024438_84523.pdf
- 质子交膜燃料电池PEMFC Matlab simulink滑模控制模型,过氧比控制,温度控制,阴,阳极气压控制
- IMG20241223015444.jpg
- 模块化多电平变器(MMC),本模型为三相MMC整流器 控制策略:双闭环控制、桥臂电压均衡控制、模块电压均衡控制、环流抑制控制策略、载波移相调制,可供参考学习使用,默认发2020b版本及以上
- Delphi 12 控件之FlashAV FFMPEG VCL Player For Delphi v7.0 for D10-D11 Full Source.7z
- Delphi 12 控件之DevExpressVCLProducts-24.2.3.exe.zip
- Mysql配置文件优化内容 my.cnf
- 中国地级市CO2排放数据(2000-2023年).zip
- smart200光栅报警程序
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


