没有合适的资源?快使用搜索试试~
我知道了~
文库首页
人工智能
机器学习
工业机器人-末端执行器D-H法位姿确定.ppt
工业机器人-末端执行器D-H法位姿确定.ppt
1.该资源内容由用户上传,如若侵权请联系客服进行举报
2.虚拟产品一经售出概不退款(资源遇到问题,请及时私信上传者)
版权申诉
机器人
工业机器人
技术基础
0 下载量
83 浏览量
2022-11-09
08:47:07
上传
评论
收藏
695KB
PPT
举报
温馨提示
618特惠:¥9.90
19.90
工业机器人技术基础
资源推荐
资源详情
资源评论
机器人末端执行器.ppt
浏览:148
机器人末端执行器.ppt
工业机器人末端执行器的分类.pptx
浏览:150
工业机器人现场编程与调试运行
工业机器人末端执行器的柔顺示教研究.pdf
浏览:151
#资源达人分享计划#
工业机器人的末端执行器结构分析综述...doc
浏览:127
工业机器人的末端执行器结构分析综述
工业机器人-位姿传感器.ppt
浏览:51
工业机器人技术基础
工业机器人-刚体位姿描述.ppt
浏览:185
工业机器人技术基础
基于SolidWorks的机械式工业机器人末端执行装置的设计与实现.pdf
浏览:50
5星 · 资源好评率100%
基于SolidWorks的机械式工业机器人末端执行装置的设计与实现.pdf
基于模糊滑模的六足蛇形臂机器人的末端位姿控制.pdf
浏览:167
基于模糊滑模的六足蛇形臂机器人的末端位姿控制.pdf
工业机器人的末端执行器结构分析综述.doc
浏览:163
工业机器人的末端执行器结构分析综述.doc
基于3D打印技术的工业机器人末端执行器解决方案.pdf
浏览:68
#资源达人分享计划#
工业机器人末端执行器配套风管故障风险评估研究.pdf
浏览:115
#资源达人分享计划#
SRT软体机器人 创新工业末端执行器.pdf
浏览:103
#资源达人分享计划#
工业机器人-S7-414H冗余控制例程.7z
浏览:18
工业机器人-S7-414H冗余控制例程.7z
工业机器人-步执行顺序(事件鼓定时器).7z
浏览:185
工业机器人-步执行顺序(事件鼓定时器).7z
工业机器人机构及其设计.ppt
浏览:118
工业机器人机构及其设计ppt,工业机器人机构及其设计
工业机器人-德国的吸尘器.7z
浏览:32
工业机器人-德国的吸尘器.7z
工业机器人-性能规范及其试验方法.pdf
浏览:4
5星 · 资源好评率100%
工业机器人-性能规范及其试验方法.pdf
工业机器人-收尘器程序.7z
浏览:101
工业机器人-收尘器程序.7z
工业机器人-位姿矢量与齐次坐标.ppt
浏览:81
工业机器人技术基础
基于matlab小波包的工业机器人位姿分析.pdf
浏览:186
基于matlab小波包的工业机器人位姿分析.pdf
工业机器人-S7-400H 容错系统手册.zip
浏览:148
工业机器人-S7-400H 容错系统手册
工业机器人-用编码器测玻璃框.7z
浏览:2
工业机器人-用编码器测玻璃框.7z
ABB工业机器人-IRB 460多功能工业机器人.pdf
浏览:151
ABB工业机器人-IRB 460多功能工业机器人pdf,IRB 460 是全球最快的四轴多功能工业机器人,能显著缩短各项 作业的节拍时间,大幅提升生产效率。这款紧凑型的 4 轴机器人 到达距离为 2.4 m,有效荷重 110 kg;荷重 60 ...
工业机器人-D-H坐标系及其参数设置.ppt
浏览:87
工业机器人技术基础
博客中Kmeans以及FCM算法数据(免积分)
浏览:90
5星 · 资源好评率100%
博客中Kmeans以及FCM算法的数据,包括IRIS鸢尾花数据集、Wine葡萄酒数据集、Seed小麦种子数据集、glass数据集、WDBD乳腺癌数据集,下载在直接存入项目文件夹即可,如果下载不了,可以私信我,看到后会及时回复。
完整车牌号识别程序,可以识别车牌和颜色,可以集成到项目中 支持win7+
浏览:149
5星 · 资源好评率100%
基于.Net开发车牌号识别程序,通过控制台输出结果,可以通过启动参数传入地址,集成到项目中。 使用介绍:https://blog.csdn.net/billyyi/article/details/138597795
机器学习期末复习题及答案
浏览:85
5星 · 资源好评率100%
机器学习期末复习题及答案
神经网络回归预测--气温数据集
浏览:112
5星 · 资源好评率100%
神经网络回归预测--气温数据集
D-H
D-H
法
法
举
举
例
例
:
:
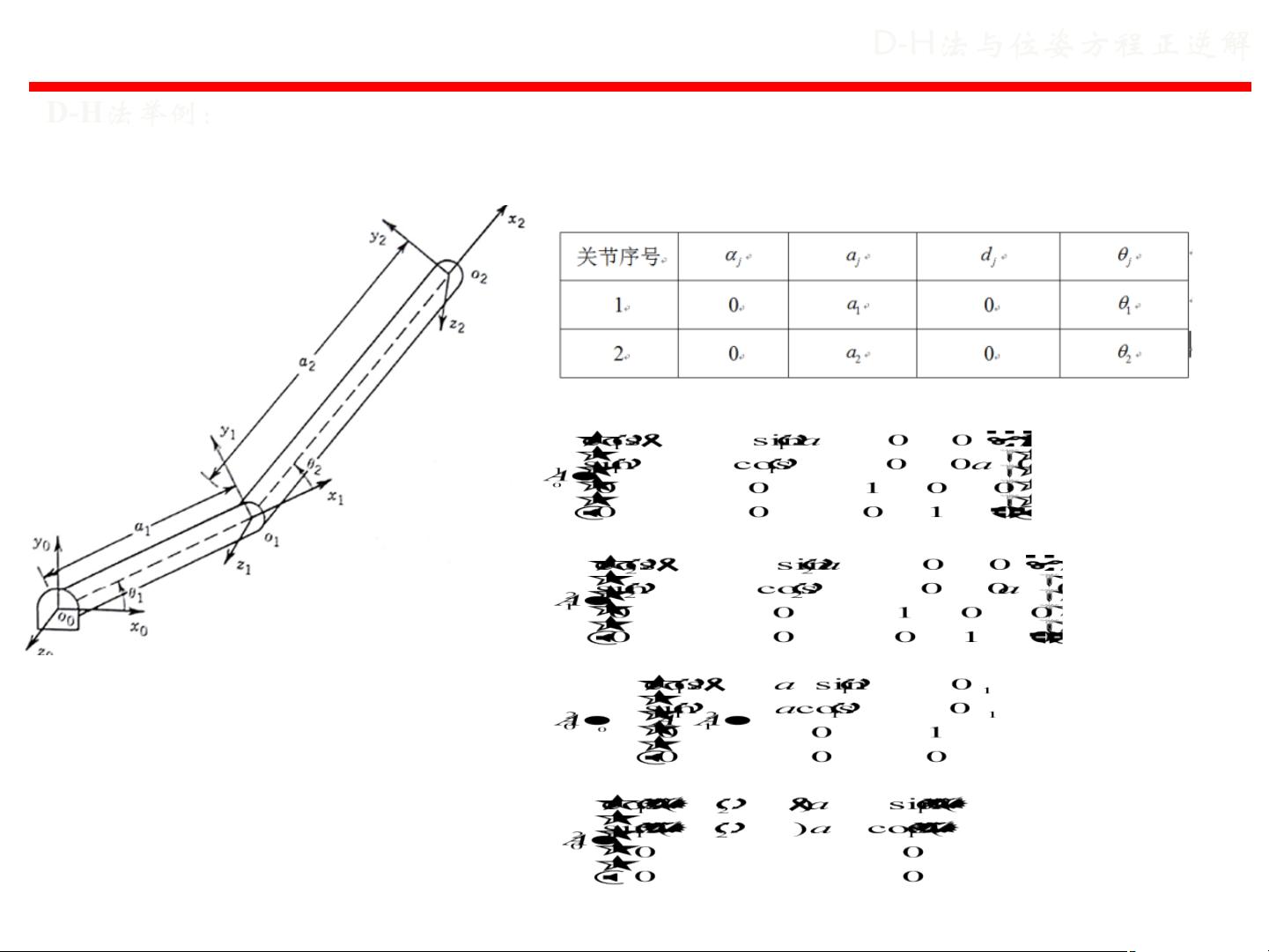
如
图
所示二
连
杆机器人,求
连
杆
3
相
对
连
杆
1
的位姿矩
阵
。
D-H
D-H
法
法
与
与
位
位
姿
姿
方
方
程
程
正
正
逆
逆
解
解
工业机器人运动学
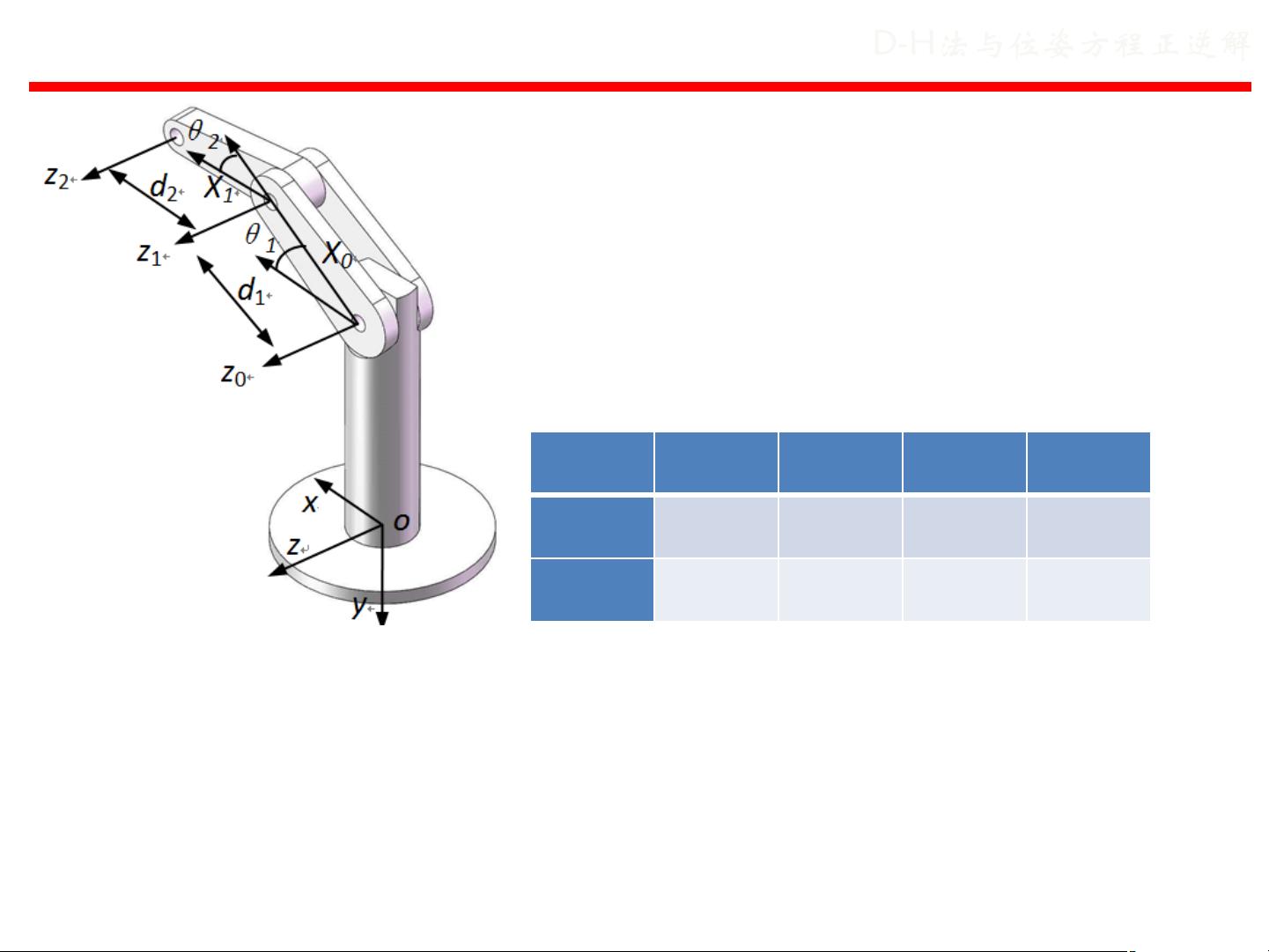
例 2.11 对于如图2-20所示的简单2轴平面机器人,根据D
-H表示法,建立必要的坐标系,填写D-H参数表,导出
该机器人的正运动学方程。
解:根据坐标系有关对z轴和x轴的定义,在图2-20上
作出各关节坐标轴。再填写D-H参数表2-2。
关节
θ
z
d
z
d
x
θ
x
0-1
θ
1
0
d
1
0
1-2
θ
2
0
d
2
0
D-H
D-H
法
法
与
与
位
位
姿
姿
方
方
程
程
正
正
逆
逆
解
解
工业机器人运动学
从0-2系的运动学方程就为:
如果给定
θ
1
、
θ
2
、
d
1
和
d
2
的值,根据正运动学方程就可以求出机器人
末端的位姿。
D-H
D-H
法
法
与
与
位
位
姿
姿
方
方
程
程
正
正
逆
逆
解
解
工业机器人运动学
剩余14页未读,
继续阅读
评论
收藏
内容反馈
1.该资源内容由用户上传,如若侵权请联系客服进行举报
2.虚拟产品一经售出概不退款(资源遇到问题,请及时私信上传者)
版权申诉
618特惠:¥9.90
19.90
资源评论
资源反馈
评论星级较低,若资源使用遇到问题可联系上传者,3个工作日内问题未解决可申请退款~
联系上传者
评论
知识世界
粉丝: 361
资源:
1万+
私信
上传资源 快速赚钱
我的内容管理
展开
我的资源
快来上传第一个资源
我的收益
登录查看自己的收益
我的积分
登录查看自己的积分
我的C币
登录后查看C币余额
我的收藏
我的下载
下载帮助
前往需求广场,查看用户热搜
最新资源
基于深度学习(LSTM)的电商购物情感分析项目源码+全部数据(高分可运行实战项目).zip
基于深度学习(LSTM)的电商购物情感分析项目源码+全部数据(高分可运行毕业设计).zip
4444444444444444444444444444
飞机大战游戏基于Java设计与实现.zip
反反复复凤飞飞反反复复付
proxyclient
前端基于vue移动端 H5 表格的组件
简单的SyntecRemoteAPI demo
删除超过时间段得日志文件
Python基于协同过滤算法的电影票房预测系统高分可运行实战项目 (源码+文档数据PDF+全部数据).zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈
安全验证
文档复制为VIP权益,开通VIP直接复制
信息提交成功