

MPU6050 数据轻松分析
这个文章是根据自己学习,查资料的汇总,同时把一些自己的心
得加进去。如果有什么不对的,欢迎请大家指正、交流。
邮箱:
最近看到加速度计和陀螺仪比较火,而且也有很多人都在研究。于是也在网上淘了一
个 模块,想用来做自平衡小车。可是使用起来就发愁了。网上关于 的
资料的确不少,但是大家都是互相抄袭,然后贴出一段程序,看完之后还是不知道所以然。
经过翻阅各个方面的资料,以及自己的研究在处理 数据方面有一些心得,在这里
和大家分享一下。
在处理加速度计和陀螺仪用到的方法都是比较简单的,这里的简单并不是不需要任何
基础知识,只是这些基本知识都是最基本的,比如简单的三角函数,数学计算,物理知识
语言以及基本的 知识(如果不会 会其它单片机也是一样的,本文实践是
使用 ),如果还不具备这些知识那就快去补课吧。
1、 加速度和陀螺仪原理
当然,在开始之前至少要弄懂什么是加速度计,什么是陀螺仪吧,否则那后边讲的都
是没有意义的。简单的说,加速度计主要是测量物体运动的加速度,陀螺仪主要测量物体
转动的角速度。这些理论的知识我就不多说了,都可以在网上查到。这里推荐一篇讲的比
较详细的文章《 !"#$%&'
"(》,在网上可以直接搜索到。
2、 加速度测量
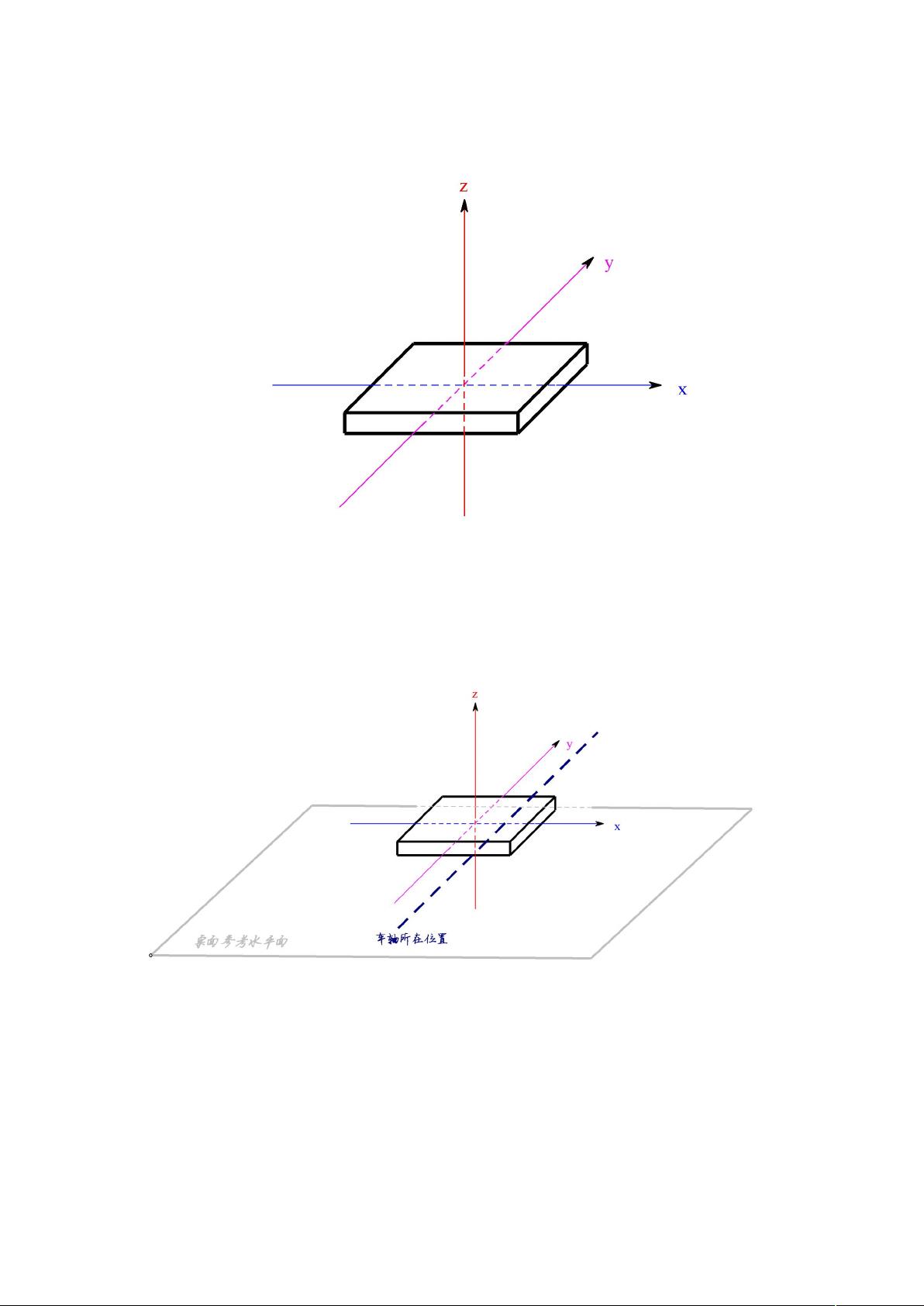
在开始之前,不知大家是否还记得加速度具有合成定理?如果不记得可以先大概了解
一下,其实简单的举个例子来说就是重力加速度可以理解成是由 )*#* 三个方向的加速度共
同作用的结果。反过来说就是重力加速度可以分解成 )*#* 三个方向的加速度。
加速度计可以测量某一时刻 )*#* 三个方向的加速度值。而自平衡小车利用加速度计测
出重力加速度在 )*#* 轴的分量,然后利用各个方向的分量与重力加速度的比值来计算出小
车大致的倾角。其实在自平衡小车上非静止的时候,加速度计测出的结果并不是非常精确
因为大家在高中物理的时候都学过,物体时刻都会受到地球的万有引力作用产生一个向下
的重力加速度,而小车在动态时,受电机的作用肯定有一个前进或者后退方向的作用力,
而加速度计测出的结果是,重力加速度与小车运动加速度合成得到一个总的加速度在三个
方向上的分量。
不过我们暂时不考虑电机作用产生的运动加速度对测量结果的影响。因为我们要先把
复杂的事情分解成一个个简单的事情来分析,这样才能看到成果,才会有信心继续。
剩余10页未读,继续阅读
资源评论


u010561210
- 粉丝: 0
- 资源: 1









最新资源
- 使用STM32F103C8T6和ESP8266链接阿里云
- 聚英翱翔-嵌入式面试题
- HTH_ND AIO v2.8.4.zip
- MATLAB Simulink汽车电动助力转向模型EPS模型 模型包括整车二自由度模型,eps模型,上下转向柱模型,包括整车参数,匹配,建模 电动助力转向系统控制系统 电动助力转向系统被控系统 逻辑门
- 级联H桥 采用载波层叠,级联度为2,输出电平数为5
- 440大神vb.net基于winform产品进销存管理系统毕业课程源码设计
- 整流器MATLAB模型,可以用于模拟交流侧向电动汽车充电等背景 交流侧电压173V,输出电压400V,效果良好 采用电压电流双闭环,SVPWM调制
- 小电流接地系统simulink仿真 包括中性点不接地系统、中性点经消弧线圈系统适用于配电网接地选线与定位、消弧等
- Fast Video Cutter Joiner v6.3.0 一款功能强大的切割和合并视频视频编辑软件.rar
- 基于扩展卡尔曼滤波的蓄电池组SOC估算 Matlab Simulink仿真模型(成品)
- 441大神C#基于winform酒店客房预订管理系统毕业课程源码设计
- 大学生HTML5期末作业 Web前端网页制作 html5+css3+js html+css+js网页设计 体育 北京邮电大学体育部11个页面
- ACS510变频器Modbus通信参数配置与调试详解
- 基于R语言的DICE模型实践技术应用
- 西门子G120XA变频器高效节能与简易调试方法解析
- 442大神vb.net基于winform酒店客房预订管理系统毕业课程源码设计
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


