



1
Chap7 Nonlinear Control system
7.1 Introduction
7.2 Describing function
7.3 Method of the phase locus
2
7.1 Introduction
7.1 Introduction
Chap7 Nonlinear Control system
7.1.1 What is the nonlinearity ?
7.1.2 What is the nonlinear control system?
7.1.3 The typical nonlinearities.
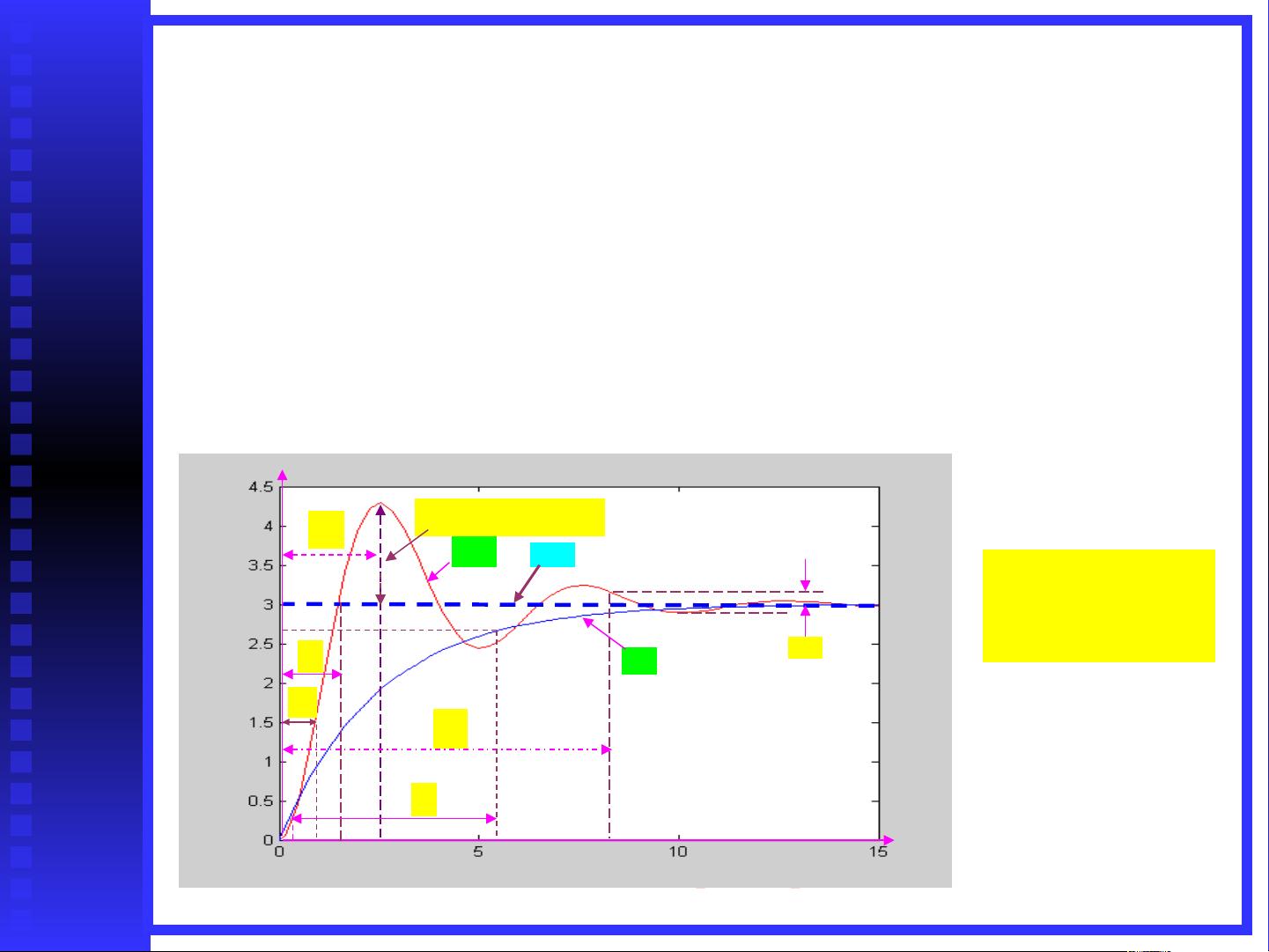
7.1.4 The speciality of the nonlinear systems
7.1.5 Analysis method of the nonlinear systems
3
7.1 Introduction
7.1 Introduction
7.1.1 What is the nonlinearity ?
The “output” varying is not proportional to the “input” va
rying for a device.
The characteristic of the nonlinear device can not be described by
the linear differential equation.
Types of the nonlinearity:
(1) Essential nonlinearity
The nonlinearity y=f(x) can not be expressed as the Talor
series expansion in all x.
( 2) Nonessential nonlinearity
The y=f(x) can be expressed as the Talor series expan-s
ion in all x.
4
7.1 Introduction
7.1 Introduction
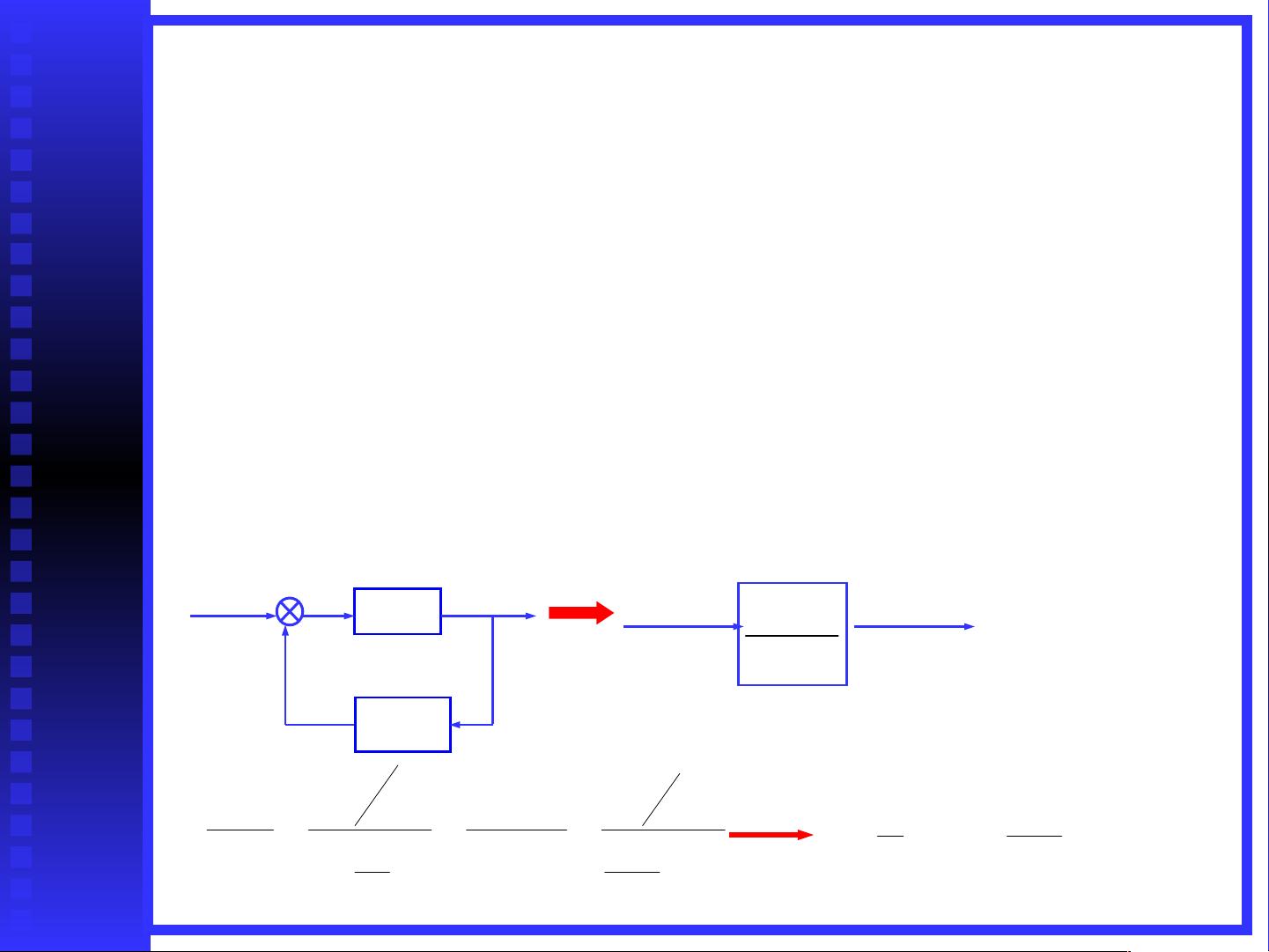
7.1. 2 What is the nonlinear control system?
If a control system include one or more nonlinear cha-r
acteristic element or link , the system is named as the no
nlinear control system.
7.1.3 The typical nonlinearities
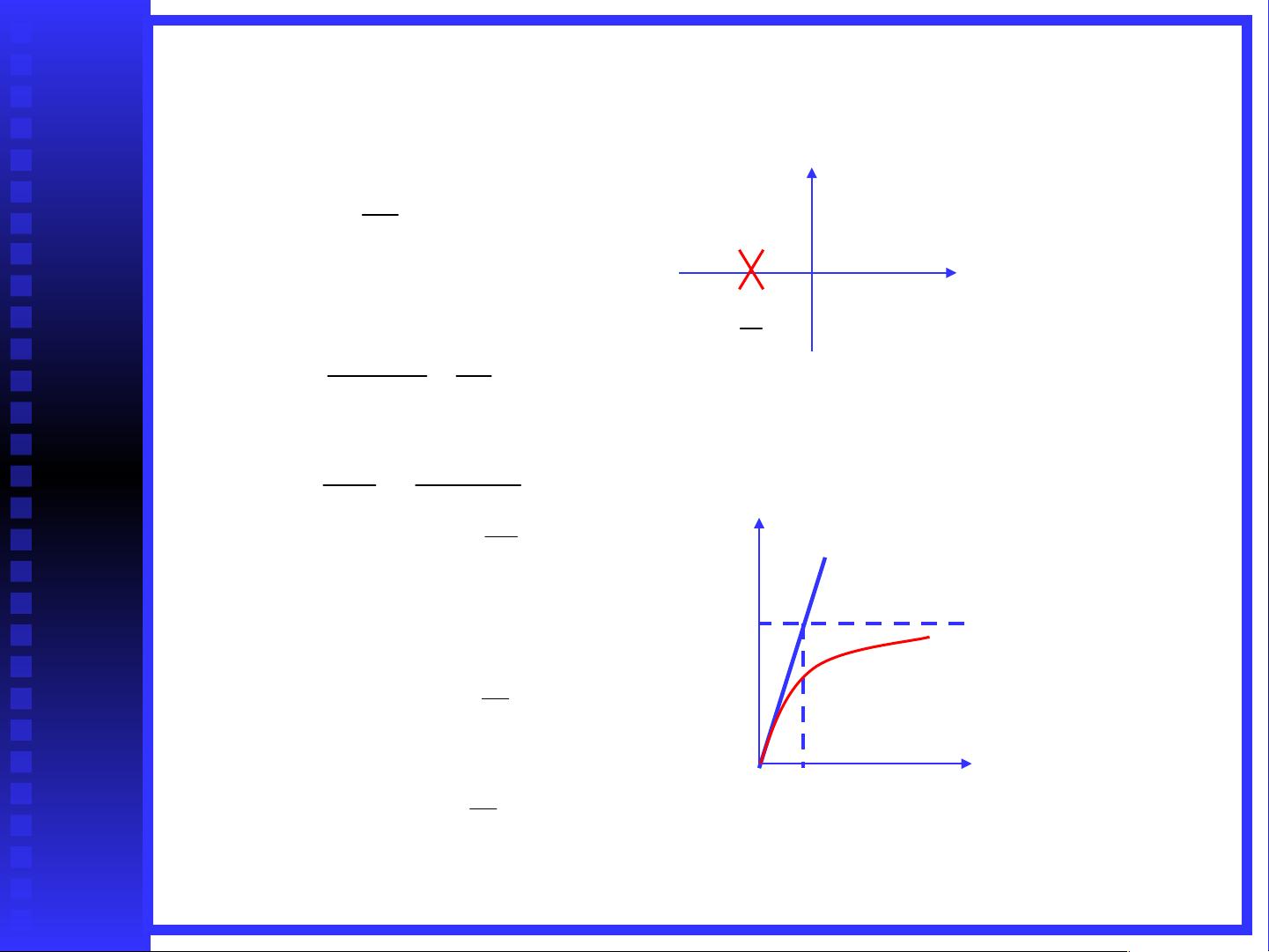
(1) Saturation nonlinearity
(1) Saturation nonlinearity
)(ty
)(tx
0
a
b
b
k
a
stic;characterihe linear slope of tke width; linear zon a
atxxsignka
atxtkx
ty
tion al descripMathematic
)( (t)
)( )(
)(
01
01
)(
)(
)(
tx
tx
txsign

5
Actual examples: saturation characteristic of the amplifier;valve
journey; power limit etc.
7.1.3 The typical nonlinearities
(2) Dead zone nonlinearity
(2) Dead zone nonlinearity
)(tx
k
)(ty
0
a
a
k
; ;
)( (t) sing-(t)
)(
)(
outputhe linear slope of tkwidthdead zone a
atxxaxk
atx
ty
tion:al descripMathematic
0
01
01
x(t)
x(t)
x(t)sign
Actual examples:
Insensitive zone of the measure system;
Turn on characteristic of the diode etc.














