
基于模糊控制的速度控制
——地面智能移动车辆速度控制系统
问题描述
利用模糊控制的方法解决速度跟踪问题,即已知期望速度(desire speed),控制油门
(throle output)和刹车(brake output)来跟踪该速度。已知输入:车速和发动机转速(值可观
测)。欲控制刹车和油门电压(同一时刻只有一个量起作用)。
算法思想
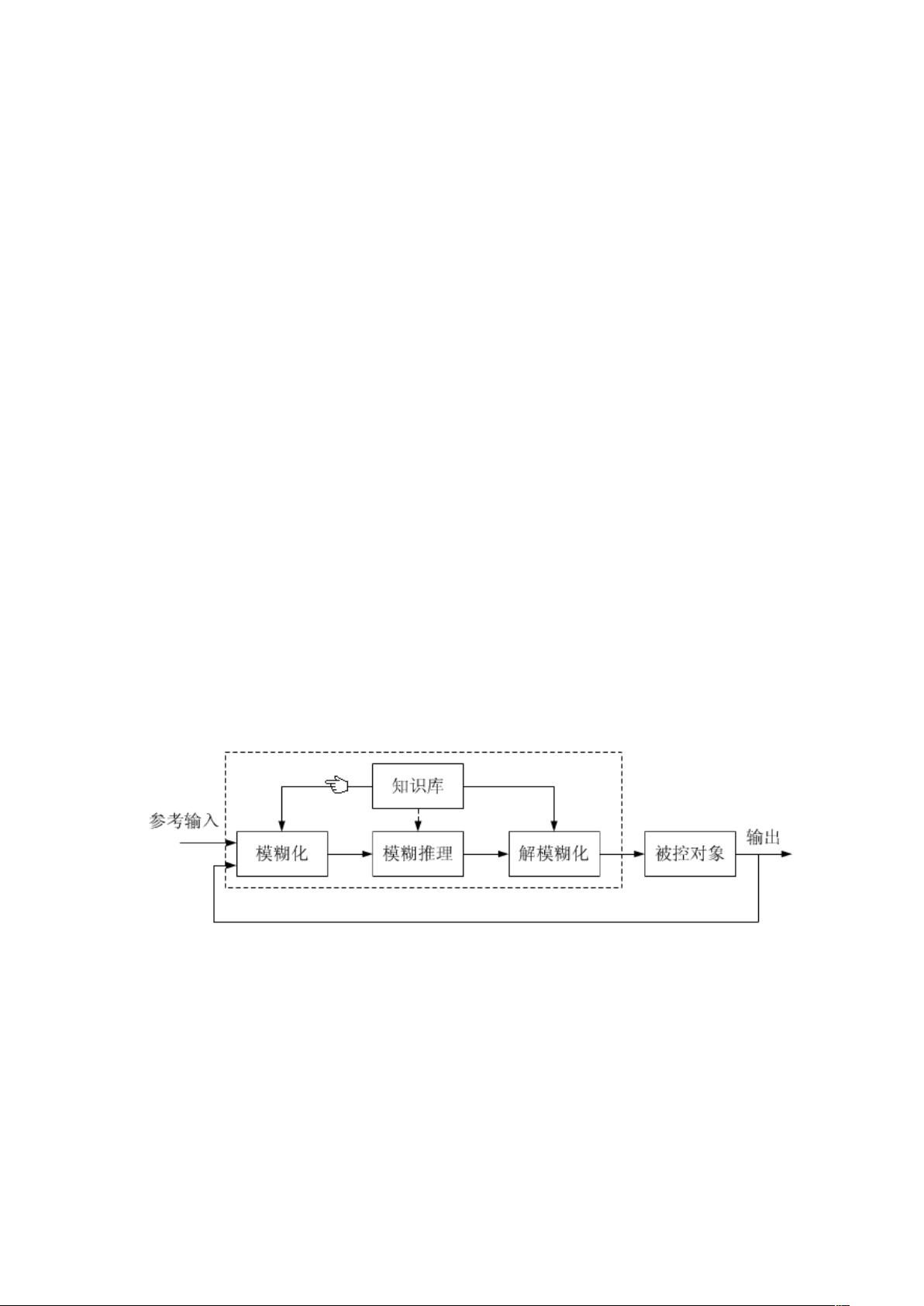
模糊控制器是一语言控制器,使得操作人员易于使用自然语言进行人机对话。模糊控
制器是一种容易控制、掌握的较理想的非线性控制器,具有较佳的适应性及强健性
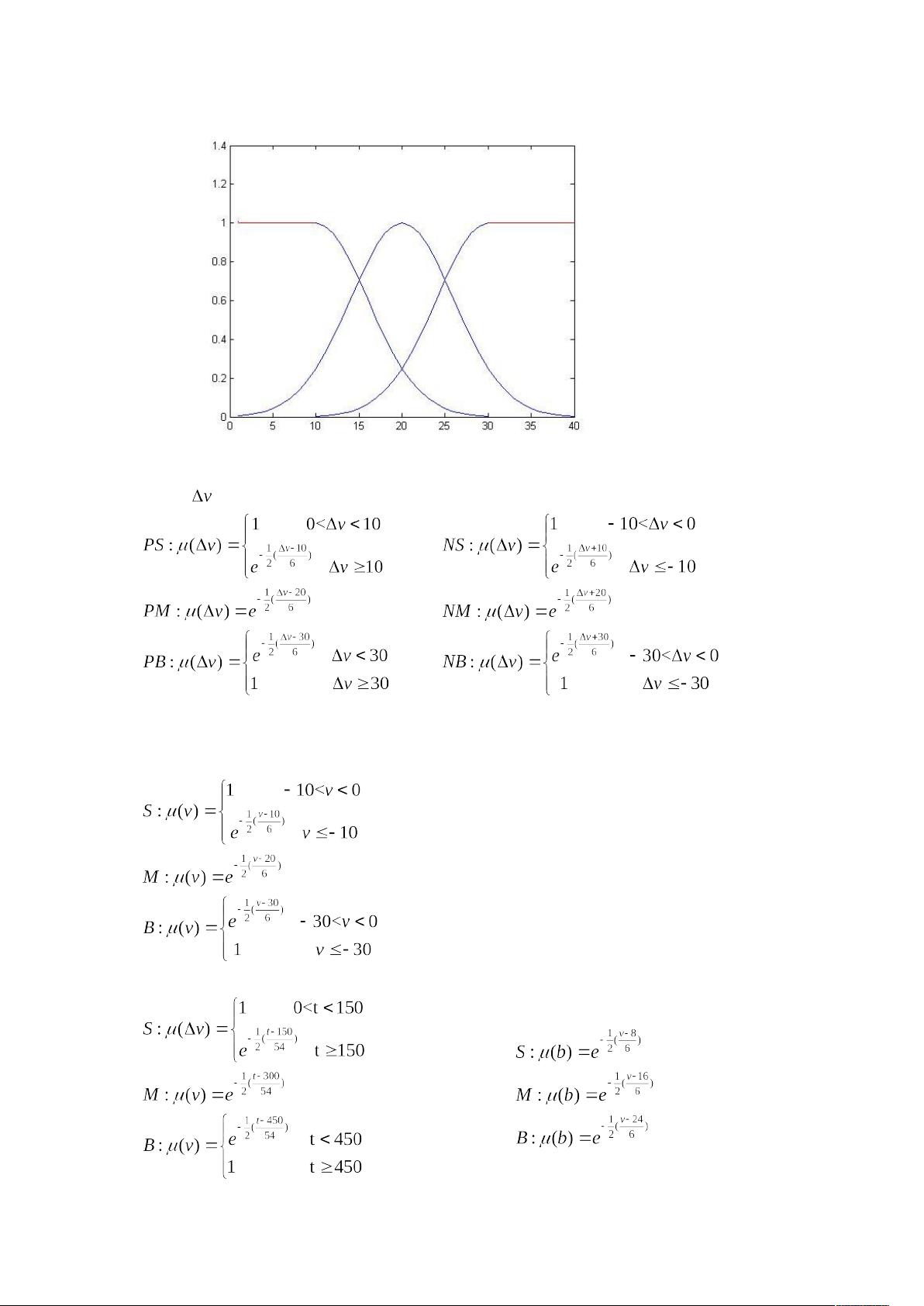
(Robustness)、较佳的容错性(Fault Tolerance)。利用控制法则来描述系统变量间的关系。不
用数值而用语言式的模糊变量来描述系统,模糊控制器不必对被控制对象建立完整的数学
模式。
Figure 1 模糊控制器的结构图
模糊控制的优点:
(1)模糊控制是一种基于规则的控制,它直接采用语言型控制规则,出发点是现场操作
人员的控制经验或相关专家的知识,在设计中不需要建立被控对象的精确的数学模型,因
而使得控制机理和策略易于接受与理解,设计简单,便于应用。
(2)由工业过程的定性认识出发,比较容易建立语言控制规则,因而模糊控制对那些数
学模型难以获取,动态特性不易掌握或变化非常显著的对象非常适用。
(3)基于模型的控制算法及系统设计方法,由于出发点和性能指标的不同,容易导致较
大差异;但一个系统语言控制规则却具有相对的独立性,利用这些控制规律间的模糊连接
容易找到折中的选择,使控制效果优于常规控制器。

剩余14页未读,继续阅读
资源评论


曼联就是牛
- 粉丝: 0
- 资源: 10









最新资源
- 自动化应用驱动的容器弹性管理平台解决方案
- 各种排序算法 Python 实现的源代码
- BlurAdmin 是一款使用 AngularJs + Bootstrap实现的单页管理端模版,视觉冲击极强的管理后台,各种动画效果
- 基于JSP+Servlet的网上书店系统源代码项目包含全套技术资料.zip
- GGJGJGJGGDGGDGG
- 基于SpringBoot的毕业设计选题系统源代码项目包含全套技术资料.zip
- Springboot + mybatis-plus + layui 实现的博客系统源代码全套技术资料.zip
- 智慧农场小程序源代码全套技术资料.zip
- 大数据技术毕业设计源代码全套技术资料.zip
- renren-ui-nodejs安装及环境配置
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


