“小强一号”——实验机器人制作过程(图文.docx
版权申诉
153 浏览量
2023-02-16
18:25:03
上传
评论
收藏 764KB DOCX 举报

“小强一号”——实验机器人制作过程(图文)
http://www.robotsky.com 来源:Mindroid 时间:2008-05-24 评论
27 条
(访问论坛) RobotSky 恭候您的投稿>>
从对机器人感兴趣开始,买了一堆书,也看了很多资料,决定先从最简单的车轮
机器人开始做。普通电脑虽然强大,但是不能直接采集外界环境的物理数据,也
不能直接控制电机。查找了下,虽然可以直接在电脑上接 USB 接口的数据采集器
用于采集传感器的数据,也可以使用 PCI 的电机控制卡来驱动各种电机,不过成
本有些高,暂时不考虑了。找了一圈,发现还是单片机方案廉价,顺便可以学习
下单片机控制和作一些电路实验。于是最终决定实验方案采用单片机来做了。
零件
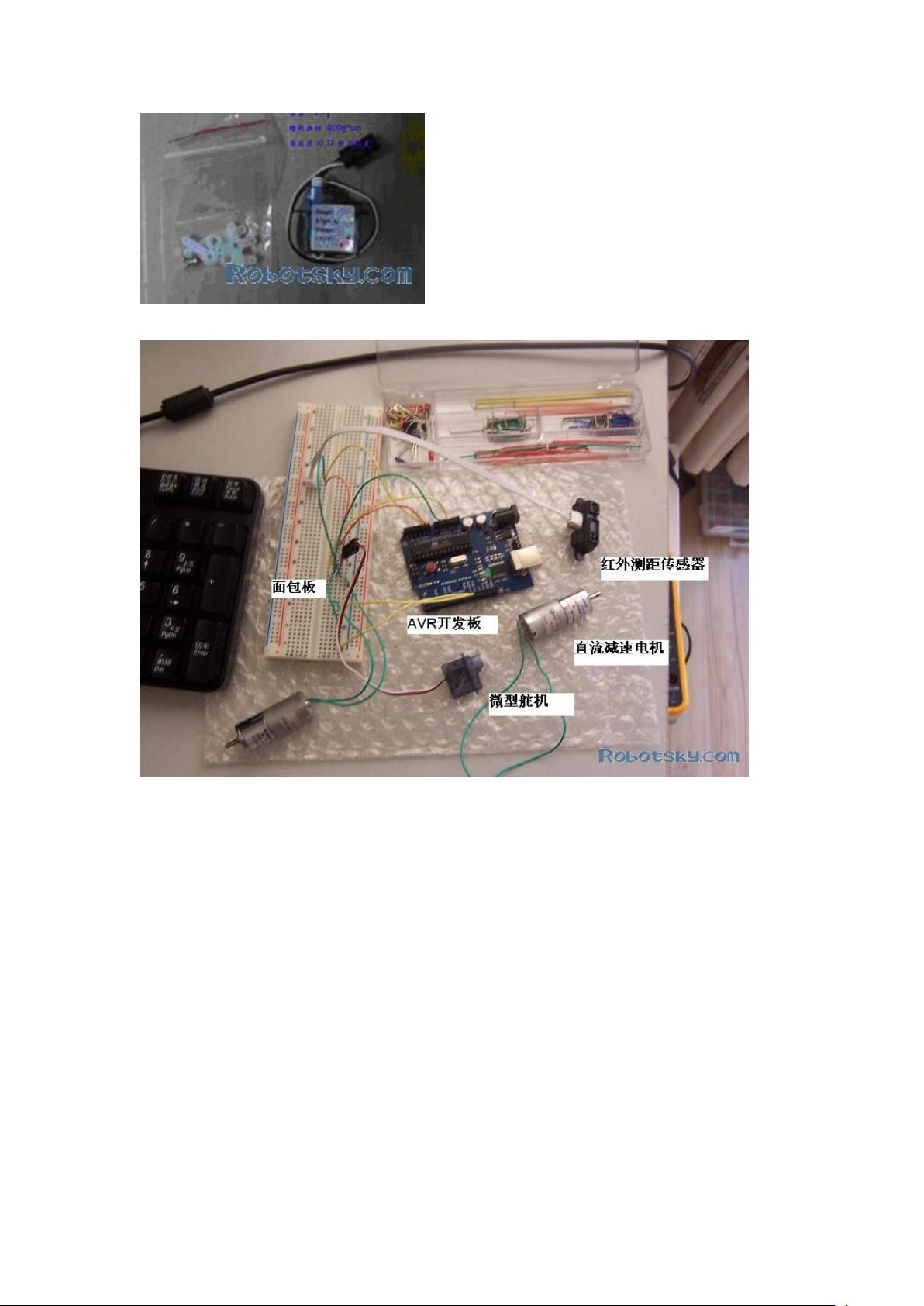
下面是采购的零件:
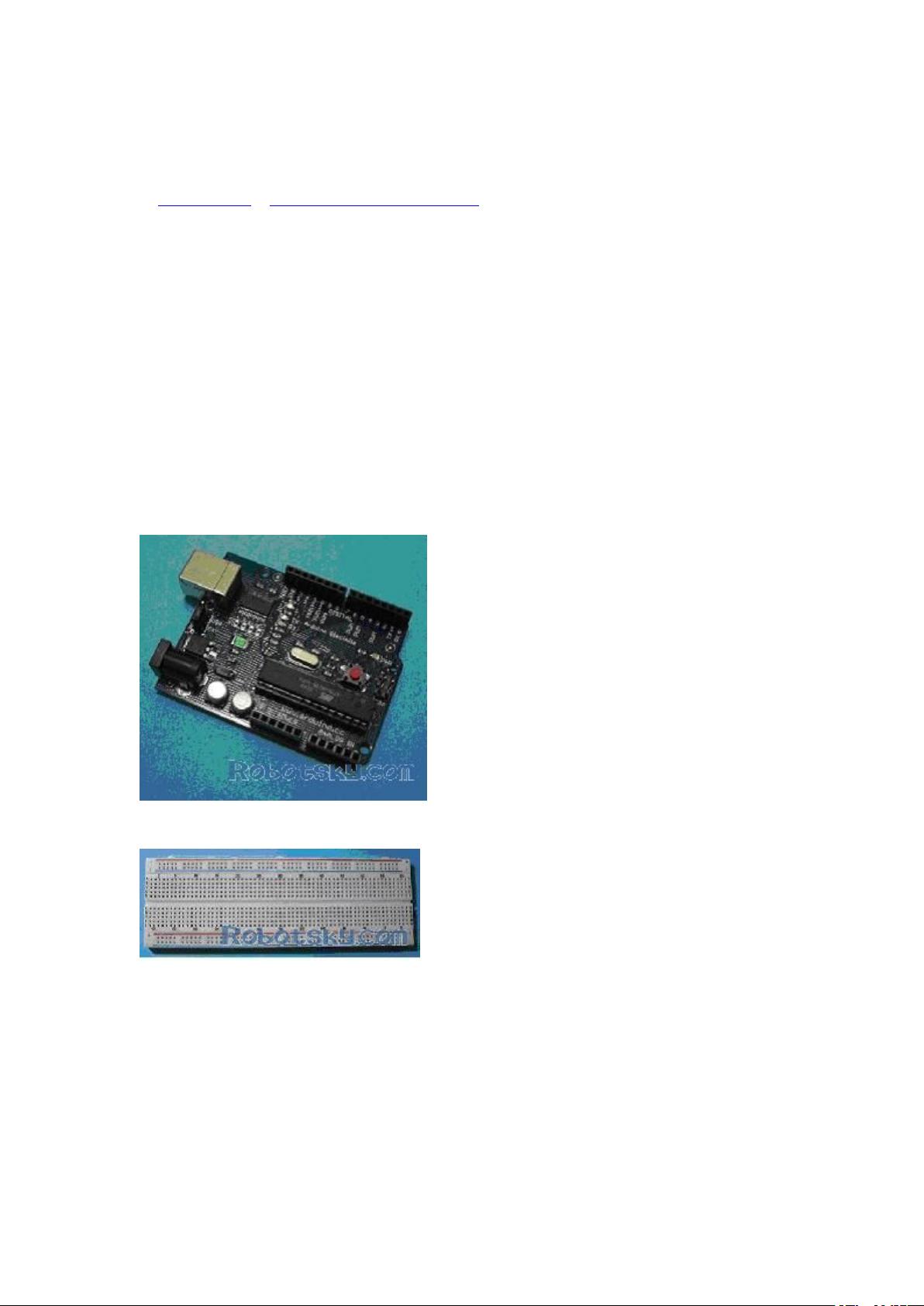
8 位单片机 Atmega168 开发板。
电路面包板和连线
用于驱动车轮的两个减速电机。没有找到合适的齿轮,自己也没有加工设备,图
简单,所以直接用集成减速齿轮的电机代替了。



剩余29页未读,继续阅读
资源评论


猫一样的女子245
- 粉丝: 93
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











