“仿生机器人”资料收集整理.docx
版权申诉
40 浏览量
2023-02-16
18:24:40
上传
评论
收藏 1.83MB DOCX 举报


“仿生机器人”资料收集整理
1. 概念
仿生机器鱼是一种按照鱼类游动的推进机理,利用机械、电子元器件或智能材料来实
现水下推进的装置。仿生机器鱼可以进
行长时间、大范围、工况较复杂的水下
作业,可以用于机动性能要求较高的场
合,进行海洋生物考察、海底勘探和海
洋救生等等许多场合。最近几年来,国内
外许多研究机构和高等院校对仿生机器
鱼进行了大量的研究,并且在各个领域中
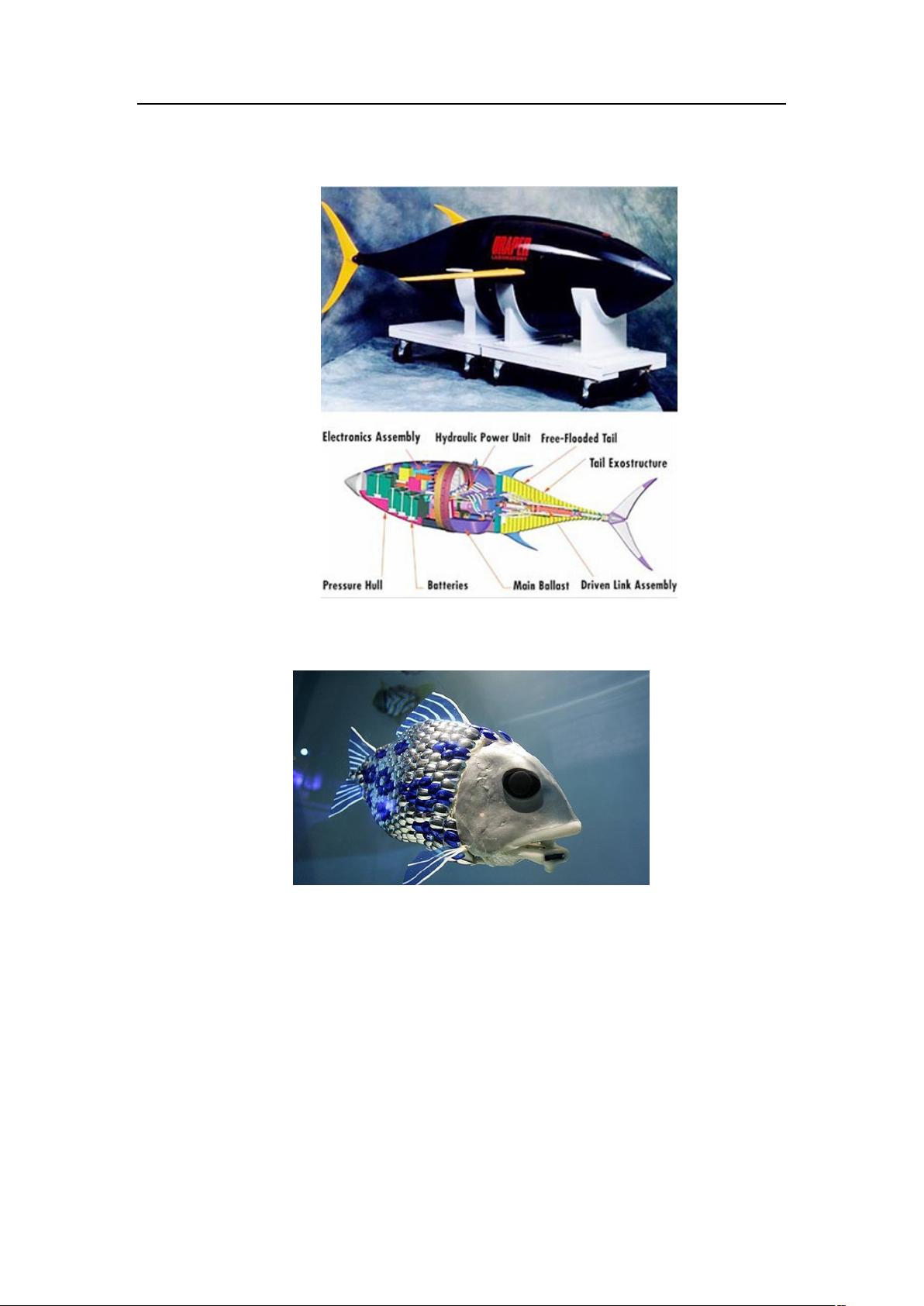
得到了实际运用。英国埃塞克斯大学的研究人员向泰晤士河投放专门设计的仿生机器鱼,用
于探测水中的污染物,并绘制河水的 3D 污染图。日本三菱重工也已经将研究的仿生机器鱼
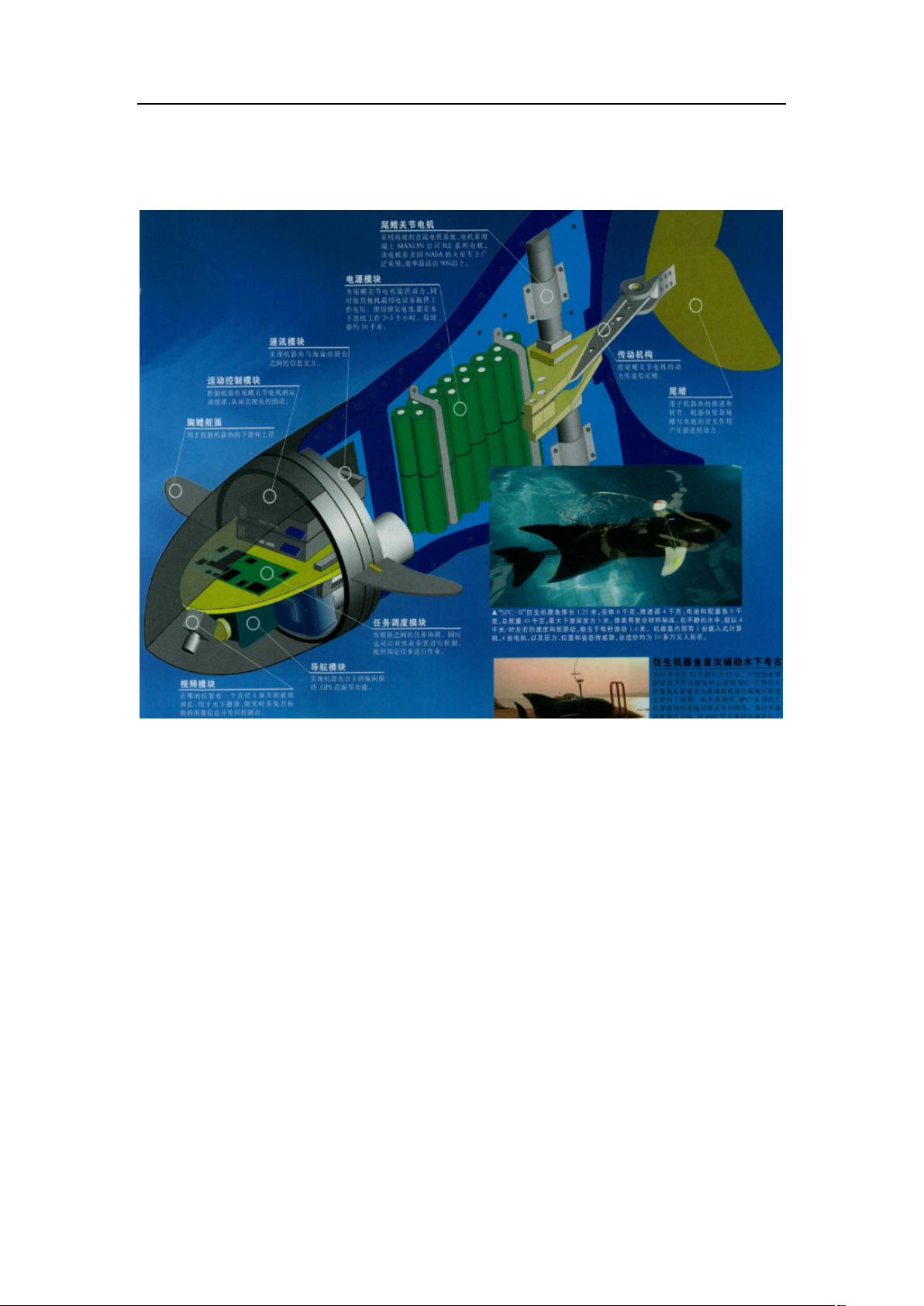
玩具批量生产。中国北京航空航天大学和中国科学院研制的 SPC-II 仿生机器鱼也成功地用
于水下考古探测。
2. 原理
仿生机器鱼主要是模仿机器鱼的外形和运动规律,尽心环境数据收集。其模仿鱼类外形
和运动规律的目的是为了实现鱼类高效的游动效率和良好的机动性。所以在仿生方面尤其注
意鱼体和鱼鳍的模仿和控制。鱼主要有背鳍、胸鳍、腹鳍、臀鳍和尾鳍。
胸鳍:它的基本功能为运动、平衡和掌握运动方向。
腹鳍:主要协助背鳍、臀鳍维持鱼体的平衡,并有辅助鱼体升降和拐弯功能。
尾鳍:有平衡、推进和转向的作用,尾的扭曲和伸直使鱼体产生前进运动。
鱼类的运动方式主要为波浪式运动,或称游泳。借助于连续的肌节收缩与舒张,从头部
开始的收缩在身体两侧交替进行,形成波浪式的传递,使收缩波传向尾部,身体则向收缩的
一侧弯曲使成 S 型。收缩在尾部结束,尾部将收缩的力传给水,这个力被水以同等大小、
但方向相反的反作用力作用于尾部。这个力向前的分力是鱼体向前运动的主要推进力。

剩余17页未读,继续阅读
资源评论


猫一样的女子245
- 粉丝: 95
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











