

实验机器人制作过程(图文)
从对机器人感兴趣开始,买了一堆书,也看了很多资料,决定先从最简单的车轮
机器人开始做。普通电脑虽然强大,但是不能直接采集外界环境的物理数据,也
不能直接控制电机。查找了下,虽然可以直接在电脑上接 USB 接口的数据采集器
用于采集传感器的数据,也可以使用 PCI 的电机控制卡来驱动各种电机,不过成
本有些高,暂时不考虑了。找了一圈,发现还是单片机方案廉价,顺便可以学习
下单片机控制和作一些电路实验。于是最终决定实验方案采用单片机来做了。
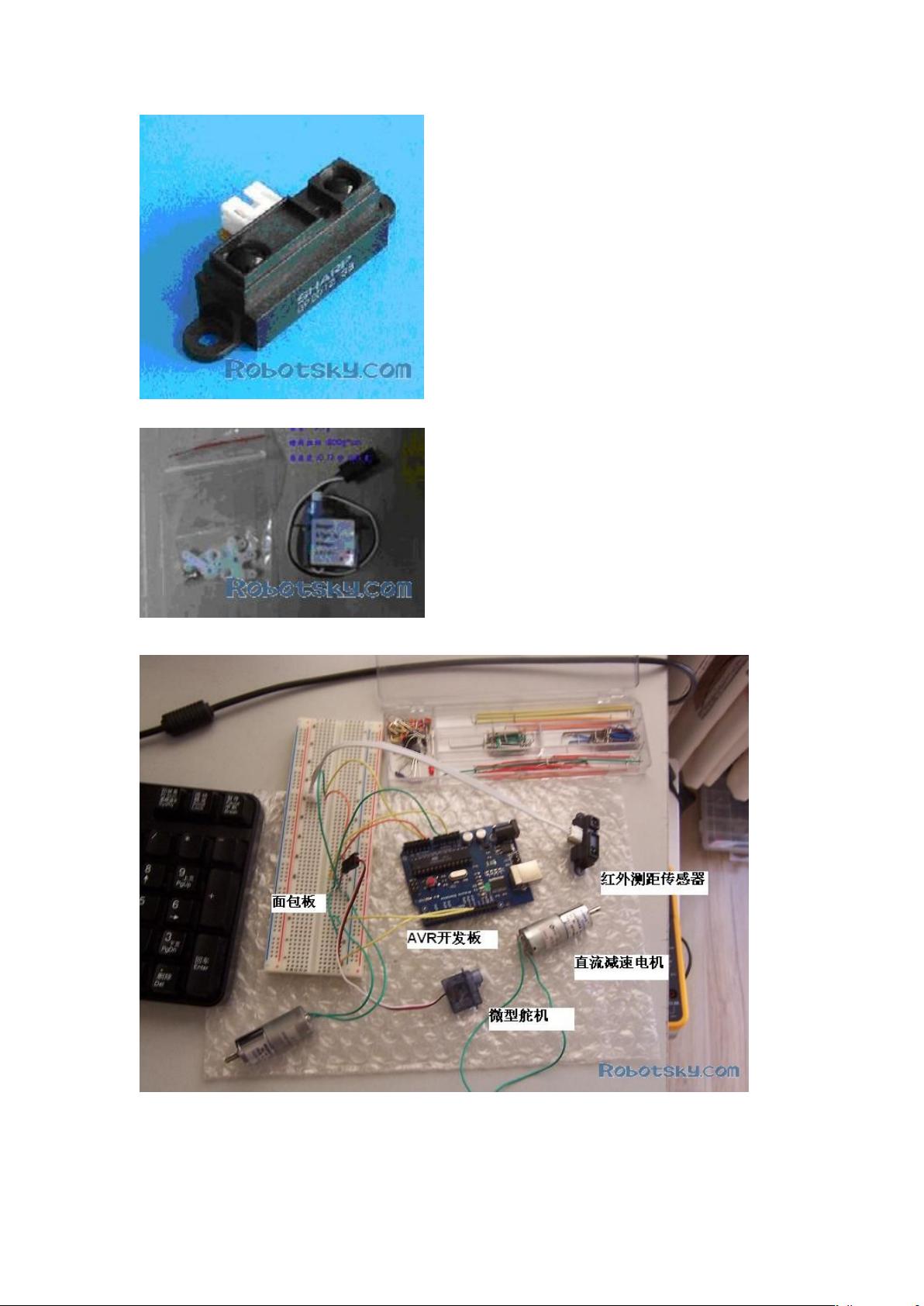
下面是采购的零件:
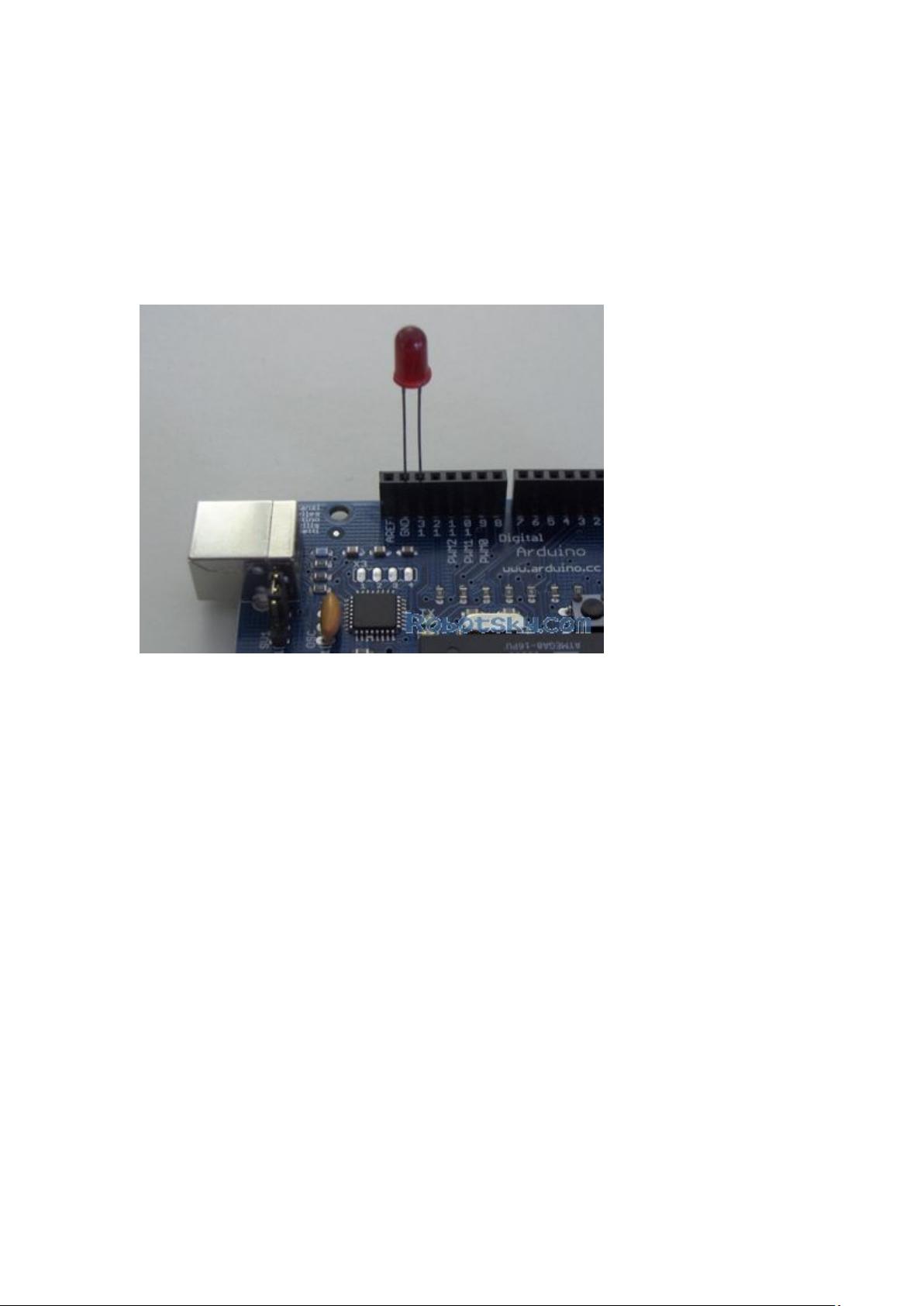
8 位单片机 Atmega168 开发板。
电路面包板和连线
用于驱动车轮的两个减速电机。没有找到合适的齿轮,自己也没有加工设备,图
简单,所以直接用集成减速齿轮的电机代替了。
距离传感器,作为机器人的主要传感器,用来探测障碍物的距离。使用的是常用
的红外距离传感器作为机器人的眼睛。
剩余26页未读,继续阅读
资源评论


猫一样的女子245
- 粉丝: 231
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 5A90铝锂合金电子束焊接接头显微分析 - .pdf
- 5E83铝合金TIG焊接头残余应力分布研究 - .pdf
- 5万m-3LNG储罐9 Ni钢内罐焊接技术.pdf
- 6mm不锈钢对接焊接接头超声检测探讨.pdf
- 07MnNiVDR钢焊接热影响区再热脆化研究 - .pdf
- 07钢管相贯节点焊接缺陷类型及对极限承载力的影响.pdf
- 7A05铝合金激光-MIG复合焊接头组织分析 - .pdf
- 08Cr2AIMoSi板材焊接冷裂纹敏感性及焊后热处理试验.pdf
- 7N01-T4铝合金搅拌摩擦焊接头的组织和耐应力腐蚀性能 - .pdf
- 7N01铝合金焊接接头力学性能及静/动态失效分析 - .pdf
- 08采用冷轧带肋钢筋焊接网的抗震墙性能研究.pdf
- 8轴激光焊接实验平台的有限元分析及优化设计.pdf
- 09CrCuSb钢焊接材料选定及其焊接工艺 - .pdf
- 09MnNiDR低温钢的焊接工艺评定.pdf
- 09MnNiDR低温容器的焊接及热处理研究 - .pdf
- 09MnNiDR低温钢焊接性分析 - .pdf
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


