
1
AUTOMAN-1 型智能机器人使用说明书
AUTOMAN-1 型智能机器人由四大部分组成。
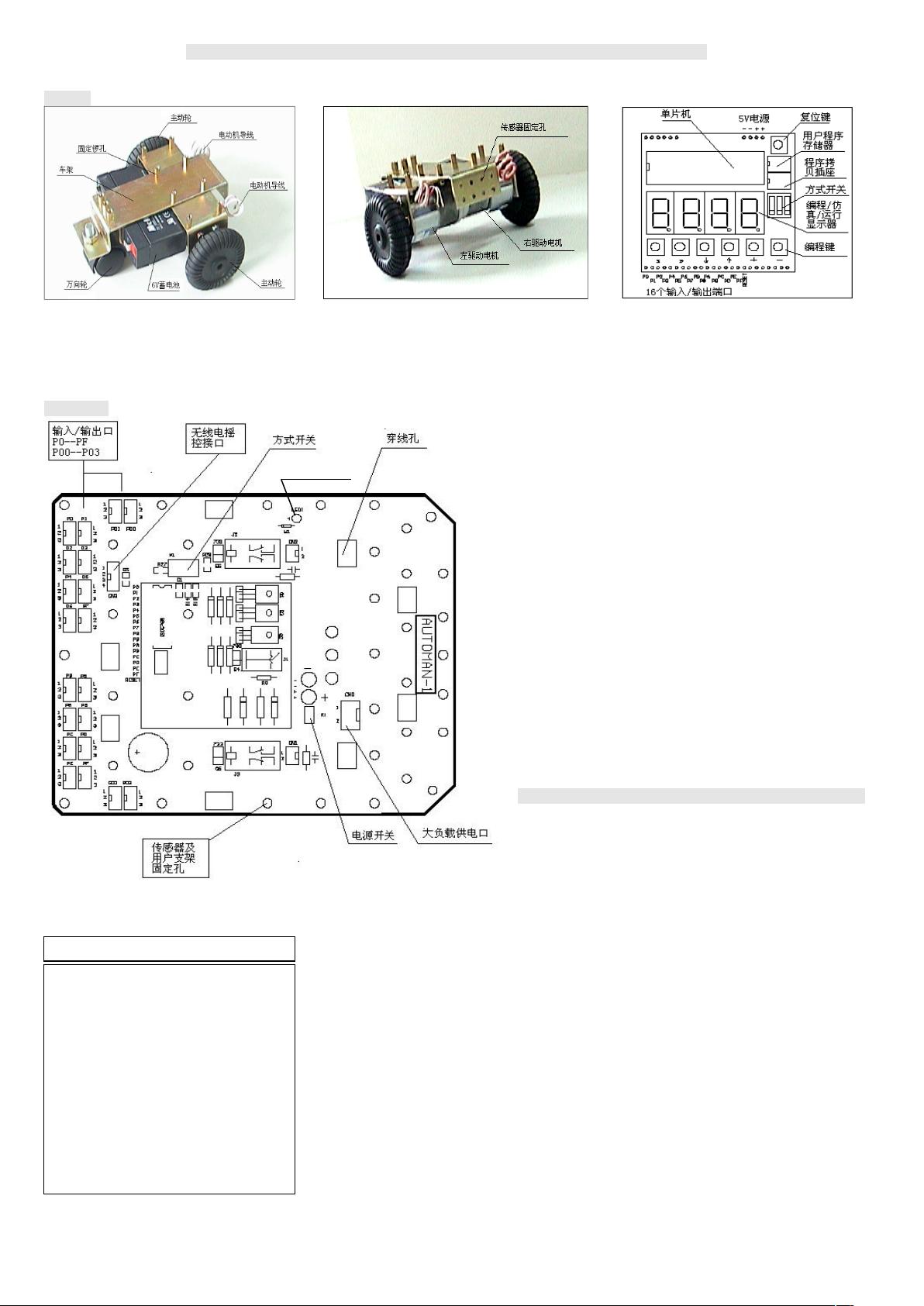
一。底盘(见图 1、图 2) 图 1、 图 2 图 3
由图 1、图 2 可知:
1. AUTOMAN-1 是由三个相隔 120 度的车轮支撑,其中二个主动轮是专门设计的全橡胶车轮,具有高防滑性高和承载力大的特点。驱动二个主动轮的是二部带有金属
减速器的大功率电动机,该电动机可以在 2V—6V 间可靠工作,转速可在 6 米/分钟—19 米/分钟间调整,即可正转也可反转; 由于是双电机驱动,所以可实现双向
360 度转弯。前轮为全塑料双轮万向轮,转动灵活,支撑有力。
2. 蓄电池为 6V/1.3 安时,在二公斤承重下可连续工作 2 小时以上.
3. 车身支架由 2 毫米厚镀锌铁板冲压而成,在其上的 11 个铜固定锣孔可固定主电路板和用户自制的支架及动作机构. 车身支架的前部和后部均有传感器固定孔.
二.主电路板(见图 4) 图 4
1。主电路板有 20 个“输入/输出口”。每一个输入/输出口都有三个端子,
其中 1 端为+5V 输出,2 端为信号输入/输出,3 端为地。用户可将各种传
感器和功率驱动部件接于输入/输出口。P0—PF 口是 PROG111M 可编程序控
电源灯 制器的端口,在 PROG111M 中有专门指令控制,P00—P03 是扩展口,可用
专门子程序控制(见第三章)。
注:机器人的前进、倒退、转弯、停止动作也用专门子程序控制(见第三章)。
2。方式开关“1”、“2”均在断开位置选择“自动/手动” 方式。在该方
式下如不接无线摇控器则机器人完全由插在主电路板上的 PROG111M 可编
程序控制器控制,此时机器人完全按照用户所编的程序运行。当接无线摇
控器后,机器人不但可按程序运行还可通过无线摇控器人工控制。
方式开关“1”、“2”均在接通(ON)位置选择“手动” 方式。在该方式
下机器人只能通过无线摇控器人工控制。
3.传感器及用户支架固定孔。用户可利用该孔固定各种传感器及用户自
制的支架及动作机构。该孔的直径为 3 毫米。
4。穿线孔。该孔用于电路板下面的各种用电件的导线通过,也可以利用
该孔固定各种传感器及用户自制的支架及动作机构。
5。大负载供电口。该口“1”脚为蓄电池 6V 正,“2” 脚为蓄电池负。当
外接的控制部件耗电较大时应采用此端供电。
6.主电路板上有红、黑电源线各一条,红线接蓄电池正(红),黑线接蓄
电池负(黑),
7.电源灯。当该灯闪亮或灭时表示蓄电池电压低于 4V 应充电了。
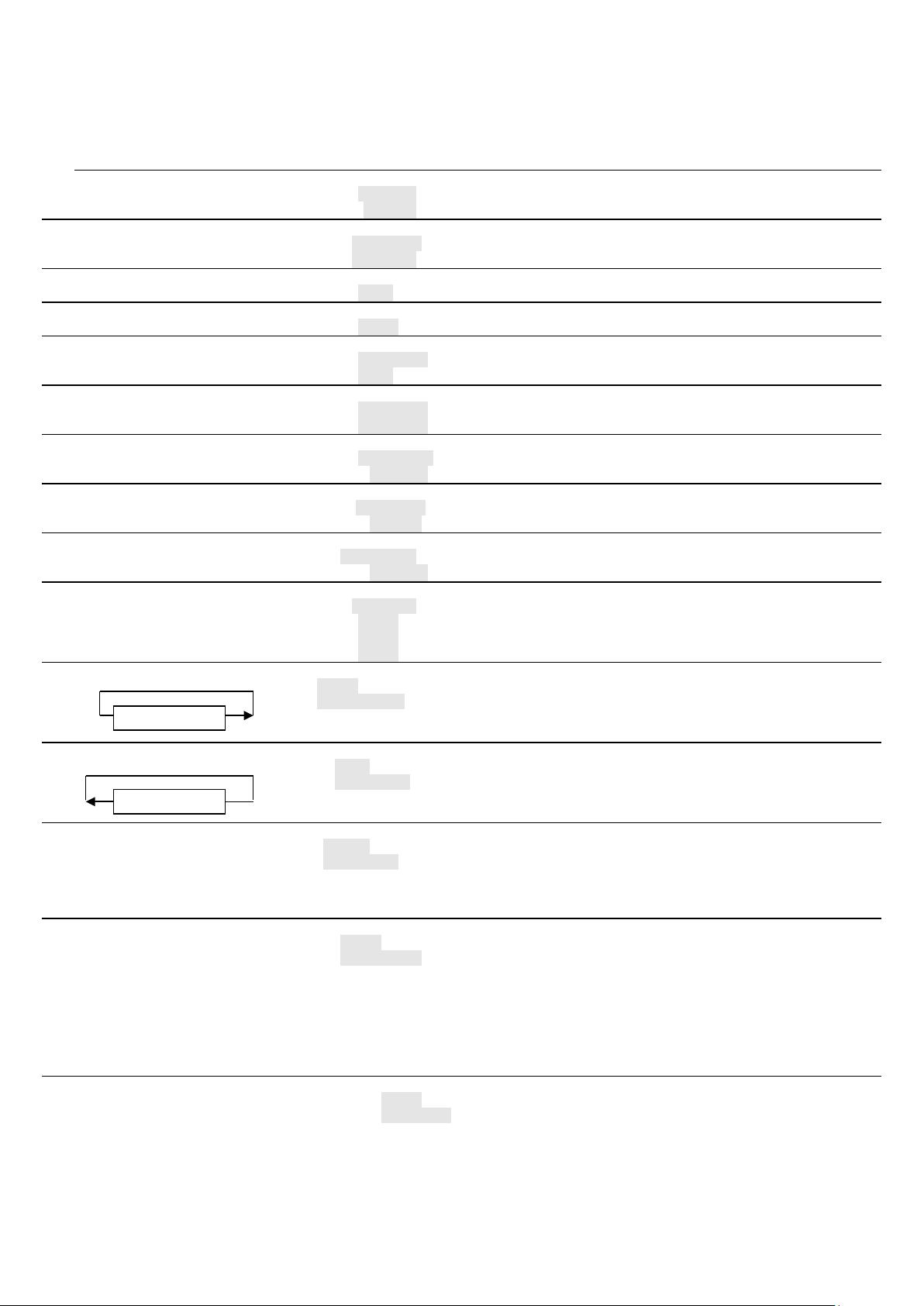
三.PROG111M 可编程序控制器对机器人扩展端口和机器人动作的控制
1.PROG111M 与机器人主电路板的通讯子程序
所有的控制指令均是通过该子程序传送给主电路板的。通讯子程序使用了
PROG111M 的如下资源:* 计数器 9 ( ] 9 )。 * 内存 99 (F99) 。
PE 口。* PF 口。
2。停车程序 3。前进程序 4。后退程序 5。前进左转 6。前进右转 7。速度 1 程序
—F99 —F99 —F99 —F99 —F99 —F99
000 001 002 003 004 005
通讯程序 —L99 —L99 —L99 —L99 —L99 —L99
8。速度 2 程序 9。速度 3 程序 10。速度 4 程序 11。P00 输出 1 12。P00 输出 0 13。P01 输出 1
— H99 (子程序入口) —F99 —F99 —F99 —F99 —F99 —F99
— ] 90 (计数器 9 清 0) 006 007 008 009 010 011
—PE0 (通讯启动) —L99 —L99 —L99 —L99 —L99 —L99
—PE1 14。P01 输出 0 15。P02 输出 1 16。P02 输出 0 17。P03 输出 1 18。P03 输出 0
— ┤PF (将 F99 的内容传送给 PF 口) —F99 —F99 —F99 —F99 —F99
F99 012 013 014 015 016
—] 91 (计数器 9 加 1) —L99 —L99 —L99 —L99 —L99
—] 9 (计数器 9 如计数到 8 就执行下
008 一条指令,否则上条 4 步) 注:速度 1 ——速度 4 的速度是由快到慢的变化
004
000
—PE0 (通讯结束)
—PE1
—└┘ (子程序返回)

剩余15页未读,继续阅读
资源评论


猫一样的女子245
- 粉丝: 231
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- PMP备考常见传统敏捷术语表 PMP备考必备 PMP术语
- 大数据实验2和6数据和python源代码.7z
- 全面解析:JavaScript语言核心技术及应用领域教程
- Java-wms基于JAVA的智能仓储管理系统, 包含PDA端和WEB端, 功能涵盖WMS(仓库管理系统), OMS(订单管理系统), BMS(财务管理系统), TMS(运输管理系统)
- MATLAB环境下基于隐马尔可夫模型-高斯混合模型-期望最大化的图像分割算法 算法运行环境为MATLAB R2021b,使用期望最大化(EM)算法进行图像分割,并同时依赖于高斯混合模型(GMM)和马尔
- 00大数据期末复习资料.7z
- 欧姆龙PLC程序欧姆龙案例欧姆龙标准程序 本产品适用于新手或者需要学习欧姆龙脉冲控制的新手 本程序包括有欧姆龙CP1H脉冲程序案例,威纶通触摸屏程序,word讲义 程序涉及方面广,适合新手入门学习
- aLinux(大三嵌入式).7z
- WebSocket协议:高效实现现代Web应用的实时通信解决方案
- 软件工程实验提交要求.zip
- 基于Javamail的邮件收发系统(系统+论文+开题报告+任务书+外文翻译+文献综述+答辩PPT).zip
- Hive函数应用实例解析:提升数据分析效率
- 软件工程PDF、思维导图、用例图、类图.7z
- 0软件工程期中、期末考.7z
- 通过FTP上传文件到一个或者多个CDN资源
- 宠物的每一帧,请务必和代码放在同一路径下再运行
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


