
应用 LabVIEW 实现 PID 控制功能
作为虚拟仪器的主流开发语言,图形语言(Graphical Language)在测试系
统中得到广泛应用。优秀的图形语言开发环境使 LabVIEW 不仅包括了开发虚拟
仪器面板的各种对象和进行信号分析的丰富的函数,而且提供了外挂的 PID 控
制工具包,使用户可以将虚拟仪器拓展到自动控制领域。
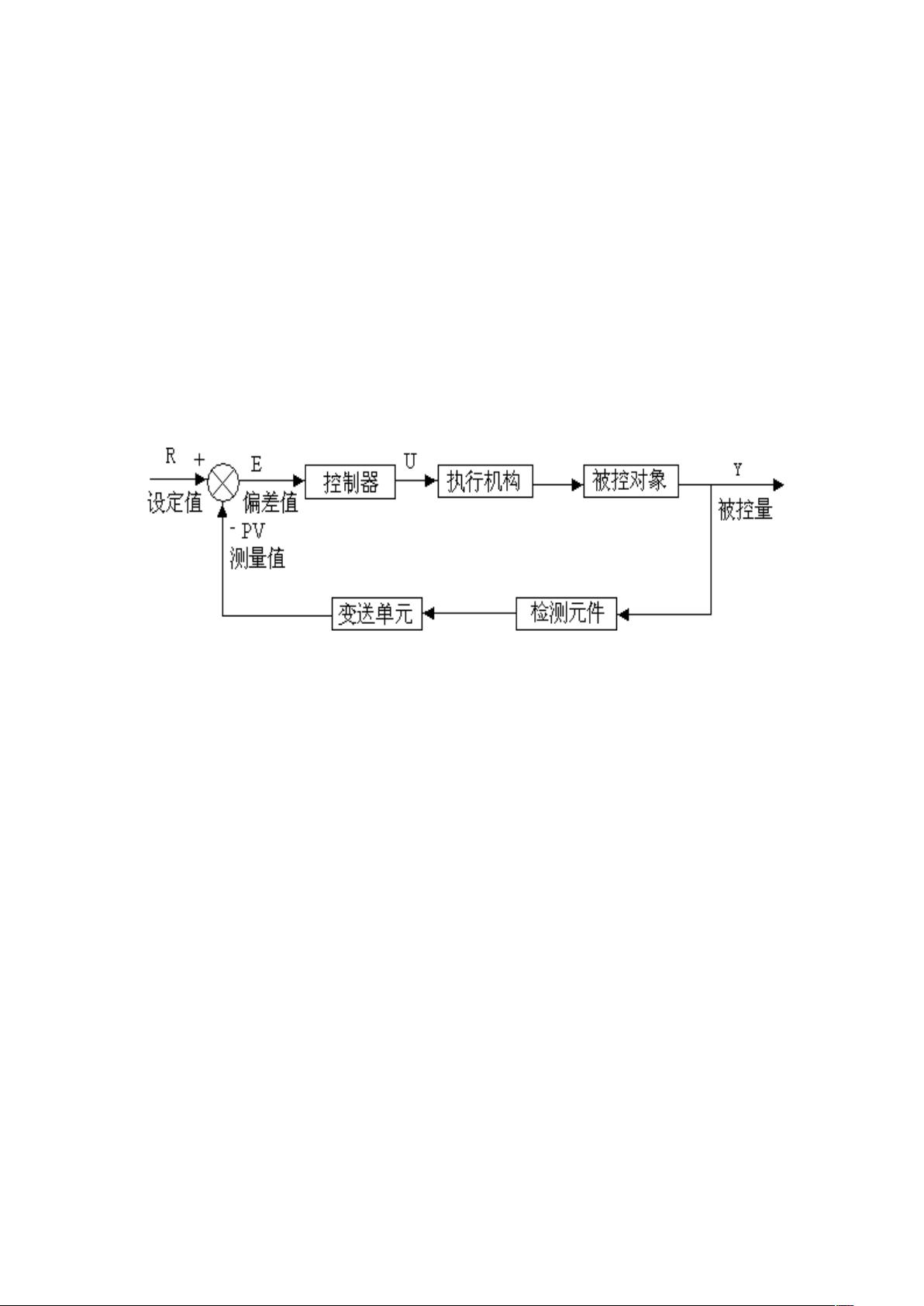
对于自动控制的基本形式,图(4-1)所示的闭环负反馈系统,不仅可以应用
虚拟仪器技术完成它的测量部分的功能,而且可以将虚拟仪器技术拓展到系统
的控制器部分,构成一种基于虚拟仪器的测量控制系统。
图 4-1 闭环负反馈系统
§4.1 PID 算式的确定
§4.1.1 PID 算式的确定
在测控系统中,被控量和操纵量确定之后,就可以根据对象的特性和对控
制质量的要求,选择控制器的控制作用,由控制器按规定的控制规律进行运算,
发出相应的控制信号去推动执行器。控制器的控制规律,即为控制器的 PID 算
式。
PID 控制算式是一种在工业控制中广泛运用的控制策略。它的优点是原理
简单,易于现实,稳定性能好。实际上,大多数的工业过程都不同程度的存在
着非线性、参数时变性和模糊不确定性,而传统的 PID 控制主要是控制具有确
定模型的线性过程,因此常规 PID 控制不具有在线整定参数的能力,其控制效
果就不是十分理想。如果采用模糊推理的方法实现 PID 参数:、
I
T
、
D
T
的在
线自适应,不仅保持了常规 PID 控制的特点,而且具有更大的灵活性、适应性
和精确性等优点,是目前一种较为先进的控制算法。
但是考虑到本软件应用客户所具有系统的特点:对象比较简单,非线性程
度不高,大多数不具有时变性和模糊不确定性,而且设备的投资成本要求较低,

剩余23页未读,继续阅读
资源评论

 weixin_530632262023-05-04简直是宝藏资源,实用价值很高,支持!
weixin_530632262023-05-04简直是宝藏资源,实用价值很高,支持!

猫一样的女子245
- 粉丝: 233
- 资源: 2万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- daily-interview-master整理的面经,内容包括机器学习,CV,NLP
- Oracle 11g安装步骤详谈.docx
- 第十四届蓝桥杯单片机组国二代码库.zip
- Java学习路径:从基础到高级的企业级开发指南
- 博客管理系统的前台代码
- 1998-2022年各地级市第二产业占GDP比重数据/地级市第二产业占比数据(全市).xlsx
- 管家婆辉煌食品版TOP13.3
- OpenCV for Unity 2.3.4
- 关于DeepSeek的全网相关资源整理及实用指南
- ollama部署包+deepseek部署指南+deepseek技术文档
- 基于STM32F103系列芯片的OTA远程升级方案:WiFi连接,稳定可靠的BIN文件升级流程,基于STM32F103系列芯片的OTA远程升级方案:WiFi连接,稳定可靠的BIN文件升级流程,stm3
- 管家婆辉煌食品版TOP13.32
- 项目到期后自动关闭11
- 基于PLC的85#三菱组态王药片装瓶自动控制系统的设计与实现,基于PLC与三菱组态王的自动控制系统在药片装瓶过程中的应用与优化,85#三菱组态王基于PLC的药片装瓶自动控制系统 ,三菱组态王
- 基于MATLAB的图像中值滤波代码
- 沈阳日立笔试题(4).zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


