机电一体化机械技术
机电一体化机械技术是指将机械系统和电气系统相结合,实现机械系统的自动化和智能化。该技术广泛应用于工业自动化、机器人技术、计算机辅助制造等领域。
§2-1 机电一体化机械系统
机电一体化机械系统是指机械系统和电气系统的结合体。机械系统包括系统的框架和支承结构、机械连接和传动系统。电气系统包括电气驱动系统、控制系统和检测系统。机电一体化机械系统的优点是可以提高机械系统的自动化和智能化水平,提高生产效率和产品质量。
§2-2 机电一体化中常用的传动机构
机电一体化中常用的传动机构有齿轮驱动、丝杠驱动、链条驱动等。这些传动机构可以将电气驱动系统的输出力矩转换为机械系统的运动能量。
§2-3 机电一体化中常用的执行机构
机电一体化中常用的执行机构有电机、伺服电机、步进电机等。这些执行机构可以将电气驱动系统的输出力矩转换为机械系统的运动能量。
§2-4 机电一体化中的虚拟样机技术
机电一体化中的虚拟样机技术是指使用计算机辅助设计和仿真技术来设计和优化机电一体化机械系统。该技术可以提高设计效率和产品质量,减少设计和试验时间。
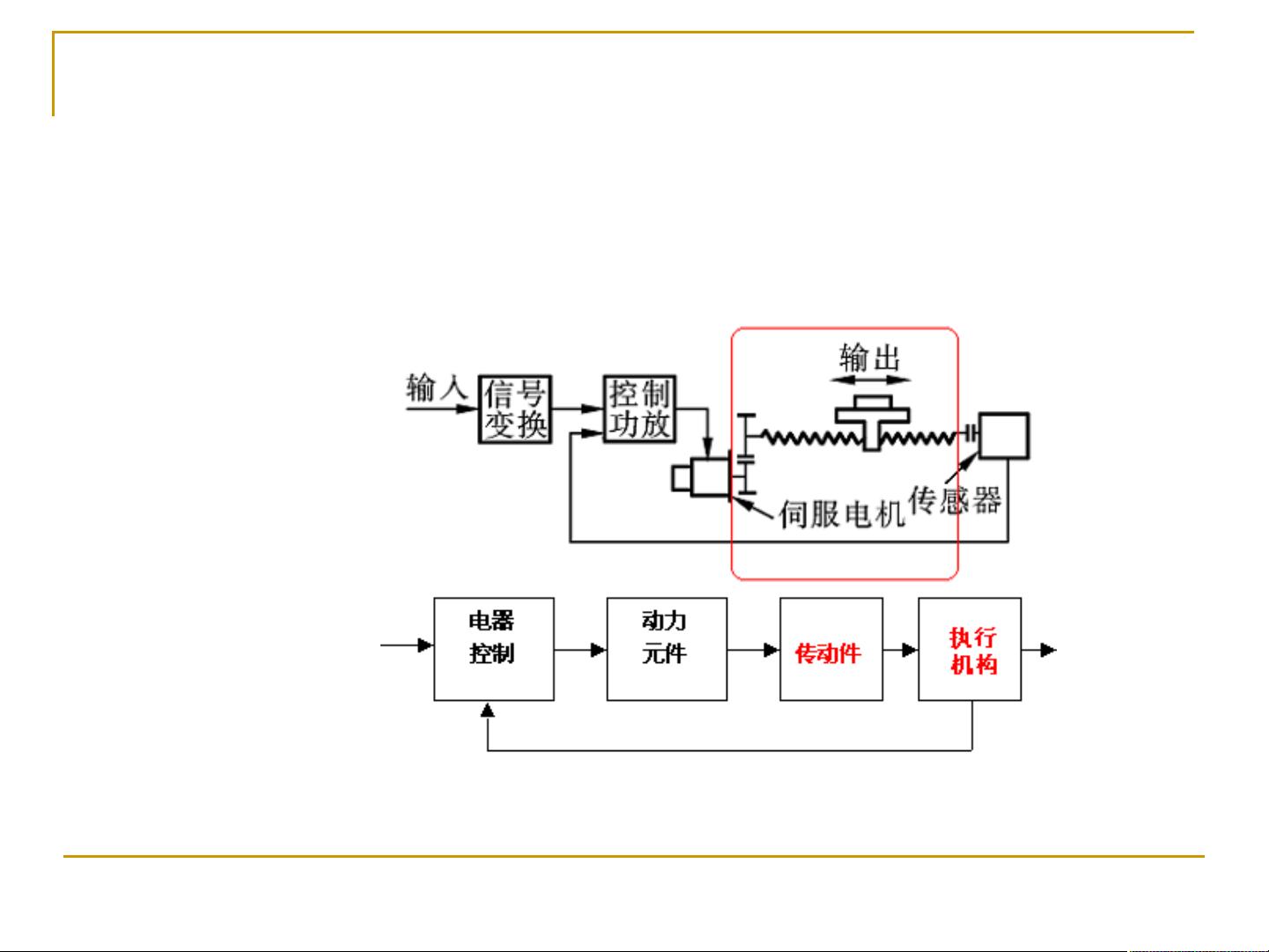
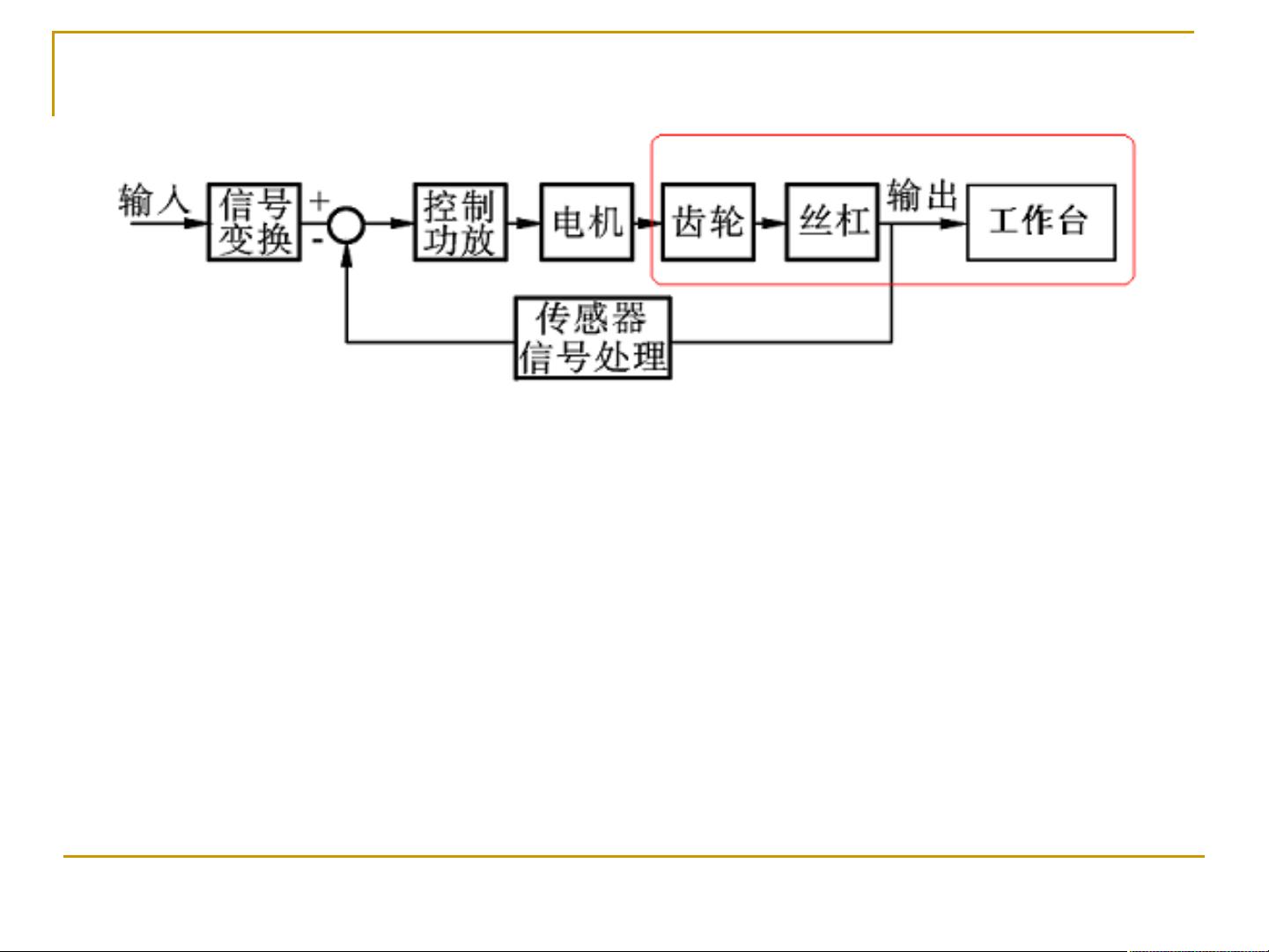
§2-1 传动系统的构成及作用
传动系统是机电一体化机械系统的核心组成部分。传动系统的构成包括电气驱动系统、传动机构和机械系统。传动系统的作用是将电气驱动系统的输出力矩转换为机械系统的运动能量。
§2-1.1 传动系统的静特性
传动系统的静特性包括静摩擦阻尼、库仑摩擦阻尼和粘性摩擦阻尼等。这些静特性对机电一体化机械系统的动态特性和稳定性有重要影响。
§2-1.2 传动系统的动特性
传动系统的动特性包括响应速度、稳定性、固有频率和阻尼特性等。这些动特性对机电一体化机械系统的动态特性和稳定性有重要影响。
§2-2 机械传动系统的特性
机械传动系统的特性包括转动惯量、阻尼和刚度等。这些特性对机电一体化机械系统的动态特性和稳定性有重要影响。
§2-2.1 转动惯量
转动惯量是机械传动系统的重要特性之一。转动惯量的计算公式为:J = (1/2) \* m \* r^2,其中m是圆柱体的质量,r是圆柱体的半径。
§2-2.2 阻尼
阻尼是机械传动系统的重要特性之一。阻尼的类型包括静摩擦阻尼、库仑摩擦阻尼和粘性摩擦阻尼等。阻尼对机电一体化机械系统的动态特性和稳定性有重要影响。
§2-2.3 刚度
刚度是机械传动系统的重要特性之一。刚度的计算公式为:K = (EA)/L,其中E是材料的杨氏模量,A是材料的截面面积,L是材料的长度。
§2-3 机电一体化系统中的执行机构
机电一体化系统中的执行机构包括电机、伺服电机、步进电机等。这些执行机构可以将电气驱动系统的输出力矩转换为机械系统的运动能量。
§2-4 机电一体化中的虚拟样机技术
机电一体化中的虚拟样机技术是指使用计算机辅助设计和仿真技术来设计和优化机电一体化机械系统。该技术可以提高设计效率和产品质量,减少设计和试验时间。
机电一体化机械技术是指将机械系统和电气系统相结合,实现机械系统的自动化和智能化。该技术广泛应用于工业自动化、机器人技术、计算机辅助制造等领域。