吸引子讲解
需积分: 10 89 浏览量
2017-05-05
16:09:49
上传
评论
收藏 952KB DOC 举报


第二章 分岔与奇怪吸引子
第一节 第一节
简单数学分岔
分岔的本义是一种力学状态在临界点处发生的转变、分开或一分为二。
分岔是一种非常普遍的自然现象。一根受力作用的弹性压杆可以形象地演
示出一类分岔现象。常识告诉我们,在力 P 的作用下,如图 2-1a 所示,当压力
超过弹性压杆的临界负荷
P
c
后,杆会出现弯曲,这时扰度 s 为压力 P 的函数。
在以 P—s 为坐标的平面上,如图 2-1b 所示,当压力 P<
P
c
时,杆的唯一平衡状
态是保持直线;当压力 P>
P
c
时,杆的平衡状态就转变成三种:保持直线(OC
方向)、偏向
s
或
s
方向,因此
P
c
是这个力学体系不同平衡状态的分岔点。
然而三种平衡状态有稳定的与不稳定的之分。其中保持直线状态是不稳定的,
稍有扰动,平衡状态便会偏向
s
或
s
状态。另两种平衡状态是稳定的,在这
两种状态中,扰度 s 随压力 P 的增加而沿曲线 OA 或 OB 增加。
图
2-1
一根弹性压杆的分岔
在数学上,分岔就是研究非线性微分方程当某一参数变化时,其解发生突
变的临界点附近的行为。当上述现象用数学方程来描述时,力学现象的分岔就
成为数学分岔。
由于许多重要的物理现象在数学上都可以某类微分方程来描述,因此数学
分岔在分析复杂的非线性动力学中具有重要意义。上一章我们在展示单摆运动
中看到,当驱动力 F 增加到某—临界值后它由规则运动进入到随机运动状态。
它是通过怎样的路迳进入混沌的?显然仅对几个特殊参数采用数值计算还无法
讲清这样的问题。为了更具体地掌握一个非线性系统如何从规则运动进入混沌,
必需对临界值附近所发生的现象作更细致更深入的研究。上一章我们在分析杜
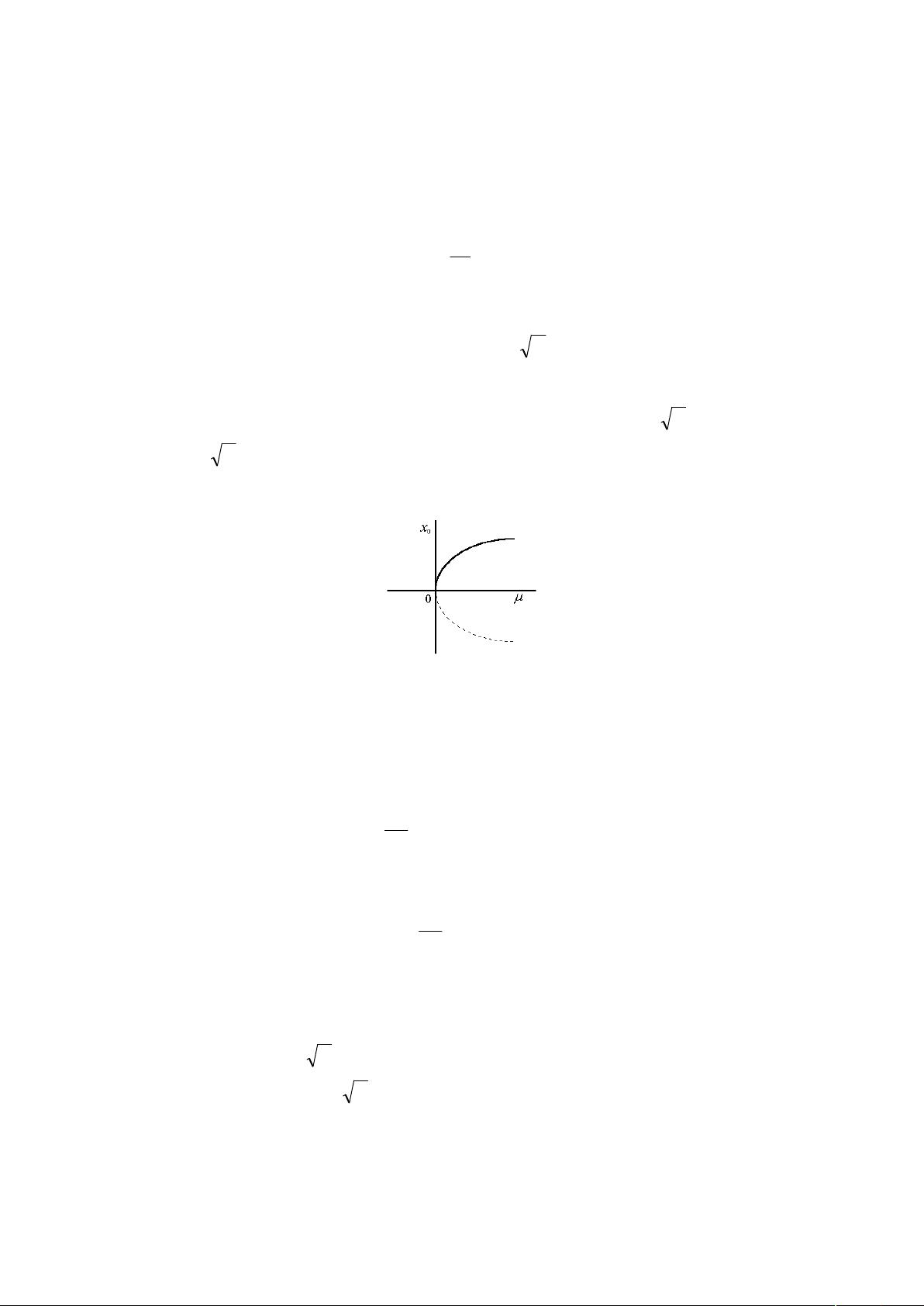
芬方程的解时知道,方程的解在参数
0
处发生了所谓叉式分岔,一个在
0
时的稳定解在
0
时分裂为两个稳定解与一个不稳定解。不同的非线性
方程应有不同的突变行为,它们有那些类型呢?本节就是从力学系统的几个简



剩余40页未读,继续阅读
资源评论













