Extrinsic Calibration of a Camera and Laser Range Finder

Extrinsic Calibration of a Camera and Laser
Range Finder (improves camera calibration)
Qilong Zhang
Department of Computer Science and Engineering
Washington University in St. Louis
St. Louis, MO. 63130 United States
Email: zql@cse.wustl.edu
Robert Pless
Department of Computer Science and Engineering
Washington University in St. Louis
St. Louis, MO. 63130 United States
Email: pless@cse.wustl.edu
Abstract— We describe theoretical and experimental results
for the extrinsic calibration of sensor platform consisting of a
camera and a 2D laser range finder. The calibration is based
on observing a planar checkerboard pattern and solving for
constraints between the “views” of a planar checkerboard
calibration pattern from a camera and laser range finder.
we give a direct solution that minimizes an algebraic error
from this constraint, and subsequent nonlinear refinement
minimizes a re-projection error. To our knowledge, this is the
first published calibration tool for this problem. Additionally
we show how this constraint can reduce the variance in
estimating intrinsic camera parameters.
I. INTRODUCTION
In the recent years, two dimensional laser ranger finders
mounted on mobile robots have become very common for
various robot navigation tasks. They provide in real time
accurate range measurements in large angular fields at a
fixed height above the ground plane, and enable robots to
perform more confidently a wide range of tasks by fusing
image data from the camera mounted on robots [12], [1],
[5], [9]. In order to effectively use the data from the camera
and laser range finder, it is important to know their relative
position and orientation from each other, which affects the
geometric interpretation of its measurements.
The calibration of each of these geometric sensors can
be decomposed into internal calibration parameters and
external parameters. The external calibration parameters
are the position and orientation of the sensor relative to
some fiducial coordinate system. The internal parameters,
such as the calibration matrix of a camera, affect how the
sensor samples the scene. This work assumes the internal
sensor calibration is known, and focuses on the external
calibration. Here we propose a method for extrinsic calibra-
tion of a camera and laser range finder, that is, identifying
the rigid transformation from the camera coordinate system
to the laser coordinate system. The method employs a
planar calibration pattern viewed simultaneously by the
camera and laser range finder. For each different pose
of the planar pattern, the method constrains the extrinsic
parameters by registering the laser scanline on the planar
pattern with the estimated pattern plane from the camera
image.
It is important also to differentiate this work from the
problems that at first may appear similar. There has been a
great deal of work on calibration for laser scanners, which
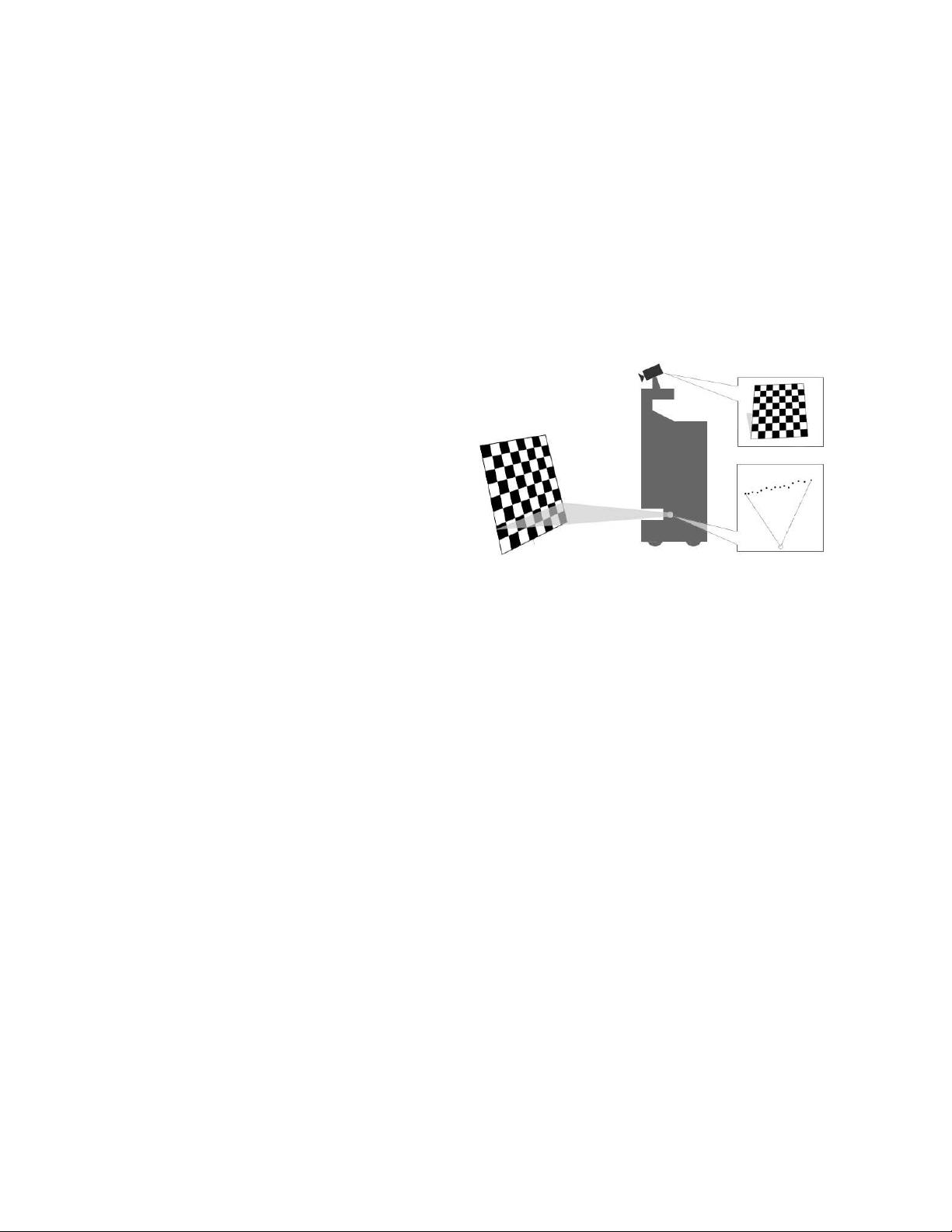
Fig. 1. A schematic of the calibration problem considered here. A
planar calibration pattern is posed in the both views of the camera
and the laser range finder.The goal of this paper is to study a
calibration method that finds the rotation Φ and the translation ∆
which transform points in the camera coordinate system to points
in the laser coordinate system
are the parts of active vision systems that project a point
or a stripe which is then viewed by the camera. Finding
the geometric relationship between the laser scanner and
the camera is vital to creating metric depth estimates to
build textured 3D models, for example [3]. Calibration
methods exist for this problem, which make use of the
visible position of the laser point or stripe [7]. In this paper
we consider an extrinsic calibration of a camera with a
laser range finder where the laser points are invisible to the
camera. This calibration applies to a very common sensor
package for a large number of autonomous robots, such
as the iRobot series, and there is no calibration method
published to date.
Even though there has been increasing use of 3D laser
range finders, they are still lack of portability and flexibil-
ity. Furthermore, the time cost of 3D data acquisition is
also very expensive, since the systems require time to scan
the laser through different directions in the environment.
For many robotic tasks, such as robot navigation, it may
be more important to scan over a smaller area at a higher
frequency, which allows autonomous robots sense the en-
vironment in real time and to act on the basis of acquired
data. That’s why we focus on the pose estimation of camera
w.r.t 2D laser range finder, which is cost-effective while
provides flexibility and accuracy for range data acquisition.
资源评论

 yealtao2014-01-21全英文,慢慢拜读。。。
yealtao2014-01-21全英文,慢慢拜读。。。
smallsnail2010
- 粉丝: 0
- 资源: 2









最新资源
- database-project-massunaAi笔记
- 2%EF%BC%9A%E9%99%95%E8%A5%BF%E
- yyspdz62_944.apk
- SAP公司间采购EDI配置-如何触发自动MIRO.docx
- python197基于图像识别的仪表实时监控系统.rar
- python196基于循环神经网络的情感分类系统.rar
- I2C驱动SHT30温湿度传感器和LCD12864使用例程(RSCG12864B)
- python193中学地理-中国的江河湖泊教学网(django).rar
- python191基于时间序列分析的大气污染预测软件(django).rar
- python190基于人脸识别智能化小区门禁管理系统.rar
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


