A Benchmark and Simulator for UAV Tracking
Matthias Mueller
(
B
)
, Neil Smith, and Bernard Ghanem
King Abdullah University of Science and Technology (KAUST),
Thuwal, Saudi Arabia
{matthias.mueller.2,neil.smith,bernard.ghanem}@kaust.edu.sa
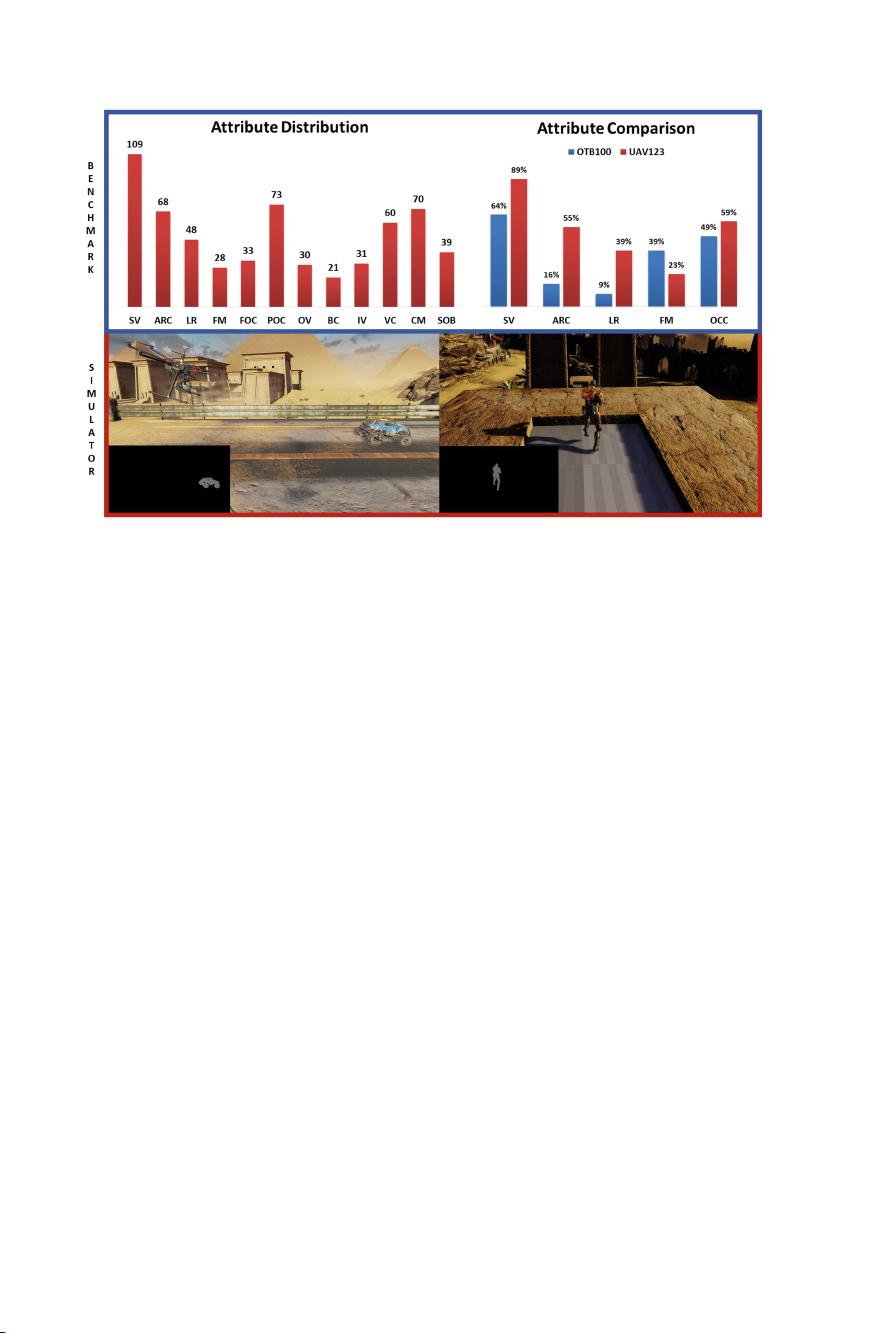
Abstract. In this paper, we propose a new aerial video dataset and
benchmark for low altitude UAV target tracking, as well as, a photo-
realistic UAV simulator that can be coupled with tracking methods. Our
benchmark provides the first evaluation of many state-of-the-art and
popular trackers on 123 new and fully annotated HD video sequences
captured from a low-altitude aerial perspective. Among the compared
trackers, we determine which ones are the most suitable for UAV track-
ing both in terms of tracking accuracy and run-time. The simulator can
be used to evaluate tracking algorithms in real-time scenarios before they
are deployed on a UAV “in the field”, as well as, generate synthetic but
photo-realistic tracking datasets with automatic ground truth annota-
tions to easily extend existing real-world datasets. Both the benchmark
and simulator are made publicly available to the vision community on
our website to further research in the area of object tracking from UAVs.
(https://ivul.kaust.edu.sa/Pages/pub-benchmark-simulator-uav.aspx.).
Keywords: UAV tracking
· UAV simulator · Aerial object tracking
1 Introduction
Visual tracking remains a challenging problem despite several decades of progress
on this important topic. A broadly adopted evaluation paradigm for visual
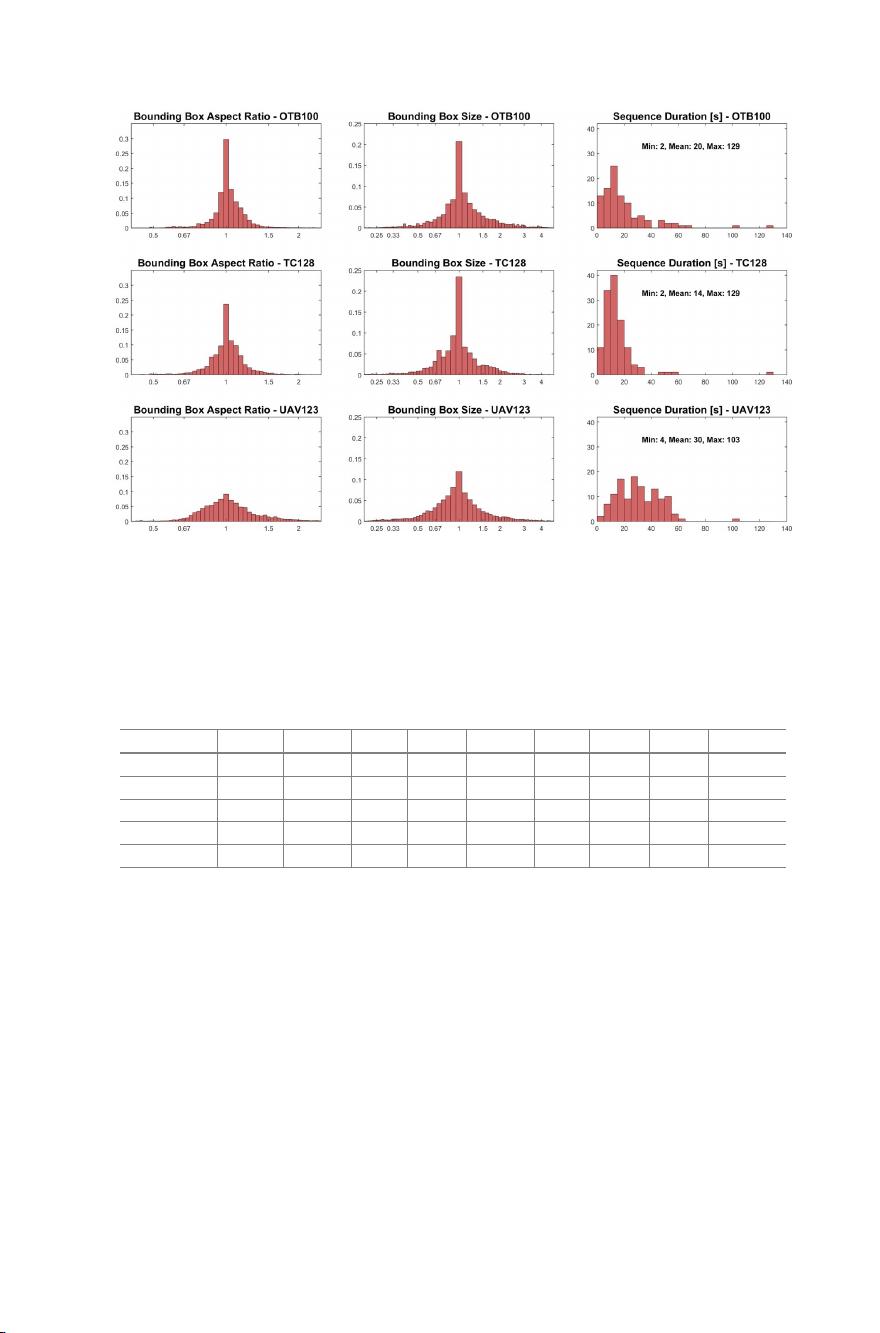
tracking algorithms is to test them on established video benchmarks such as
OTB50 [42], OTB100 [41], VOT2014, VOT2015, TC128 (Temple Color) [26],
and ALOV300++ [39]. Since the performance of a tracker is measured against
these benchmarks, it is critical that a holistic set of real-world scenarios and a
distribution of tracking nuisances (e.g. fast motion, illumination changes, scale
changes, occlusion, etc.) are properly represented in the annotated dataset. The
benchmark also plays a critical role in identifying future research directions in
the field and how to design more robust algorithms. What is currently lacking
in these well established benchmarks is a comprehensive set of annotated aerial
datasets that pose many challenges introduced by unmanned airborne flight.
Empowering unmanned aerial vehicles (UAVs) with automated computer
vision capabilities (e.g. tracking, object/activity recognition, etc.) is becoming
Electronic supplementary material The online version of this chapter (doi:10.
1007/978-3-319-46448-0
27) contains supplementary material, which is available to
authorized users.
c
Springer International Publishing AG 2016
B. Leib e et al. (Eds.): ECCV 2016, Part I, LNCS 9905, pp. 445–461, 2016.
DOI: 10.1007/978-3-319-46448-0
27