运动控制芯片LM629 PDF
需积分: 9 73 浏览量
2011-08-16
13:21:05
上传
评论
收藏 633KB PDF 举报

LM628/LM629
Precision Motion Controller
General Description
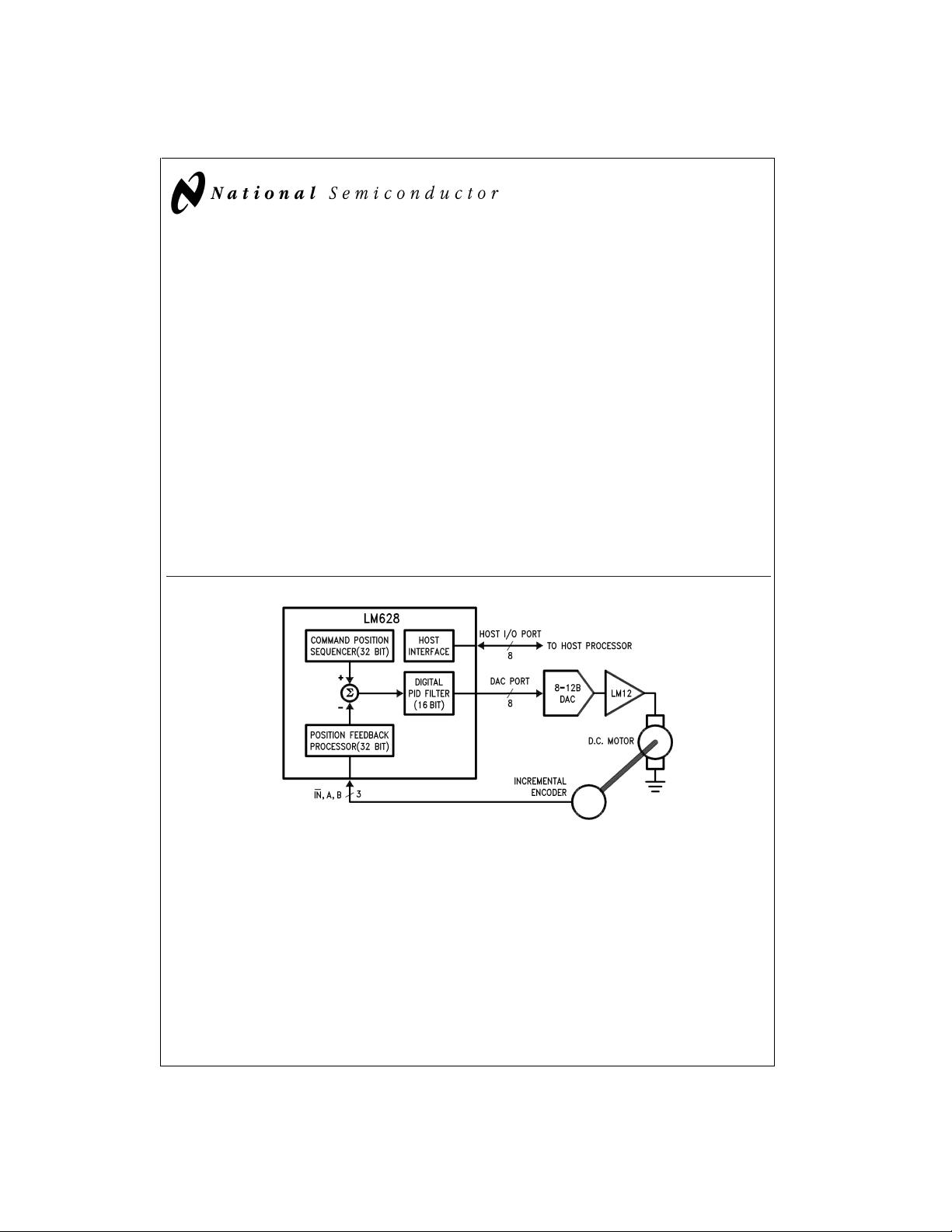
The LM628/LM629 are dedicated motion-control processors
designed for use with a variety of DC and brushless DC
servo motors, and other servomechanisms which provide a
quadrature incremental position feedback signal. The parts
perform the intensive, real-time computational tasks required
for high performance digital motion control. The host control
software interface is facilitated by a high-level command set.
The LM628 has an 8-bit output which can drive either an
8-bit or a 12-bit DAC. The components required to build a
servo system are reduced to the DC motor/actuator, an in-
cremental encoder, a DAC, a power amplifier, and the
LM628. An LM629-based system is similar, except that it
provides an 8-bit PWM output for directly driving H-switches.
The parts are fabricated in NMOS and packaged in a 28-pin
dual in-line package or a 24-pin surface mount package
(LM629 only). Both 6 MHz and 8 MHz maximum frequency
versions are available with the suffixes -6 and -8, respec-
tively, used to designate the versions. They incorporate an
SDA core processor and cells designed by SDA.
Features
n 32-bit position, velocity, and acceleration registers
n Programmable digital PID filter with 16-bit coefficients
n Programmable derivative sampling interval
n 8- or 12-bit DAC output data (LM628)
n 8-bit sign-magnitude PWM output data (LM629)
n Internal trapezoidal velocity profile generator
n Velocity, target position, and filter parameters may be
changed during motion
n Position and velocity modes of operation
n Real-time programmable host interrupts
n 8-bit parallel asynchronous host interface
n Quadrature incremental encoder interface with index
pulse input
n Available in a 28-pin dual in-line package or a 24-pin
surface mount package (LM629 only)
TRI-STATE
®
is a registered trademark of National Semiconductor Corporation.
DS009219-1
FIGURE 1. Block Diagram
November 1999
LM628/LM629 Precision Motion Controller
© 1999 National Semiconductor Corporation DS009219 www.national.com


剩余23页未读,继续阅读

sdm110110
- 粉丝: 0
- 资源: 2









最新资源
- 51单片机学习(1)-软件keil下载
- 历届(第1-21届)希望杯数学竞赛初一试题及答案(最新整理).doc全国数学邀请赛(264页资料)
- 水滴.psd
- TokenPocket_V2.1.2_release.apk
- Apache-druid-kafka-rce.yaml
- 基于C#的ASP.NET数据库原理及应用技术课程指导平台的开发
- 基于ROS的智能车轨迹跟踪算法的仿真与设计源码运用PID跟踪算法.zip.zip
- Bug Bounty Tip - i春秋Self-XSS变废为宝的奇思妙想
- 1991-2015年全国初中化学竞赛复赛试题汇编(212页)(24年竞赛复赛真题).docx天原杯
- Apache Flink 未授权访问+远程代码执行.pdf
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0