日本安川机器人25点标定流程
需积分: 50 167 浏览量
2019-02-12
16:42:53
上传
评论 4
收藏 2.67MB PDF 举报

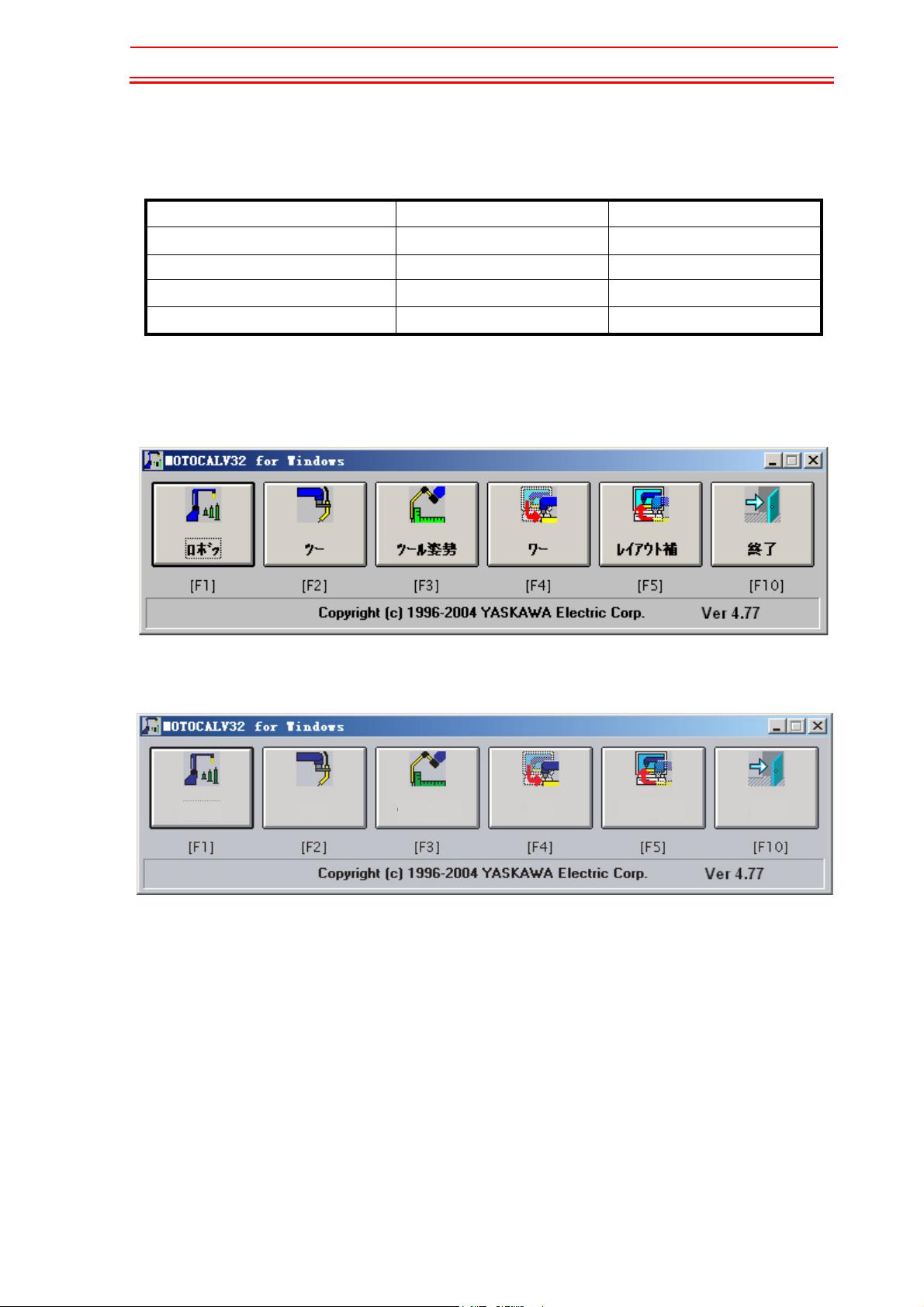
一、MOTOCALV32 软件的作用
MOTOCALV32 中的机器人校准程序是通过在 5 个位置各示教 5 个姿态不同的点 ( 合计 25
点 ) , 来调整机器人的绝对原点数据和工具数据 , 从而提高机器人的绝对精度。
安装方法请参考附录 3。
二、机器人侧的操作方法
1. 在使用 MOTOCAL32 的机器人校准前,请先对机器人安装的工具进行校准。
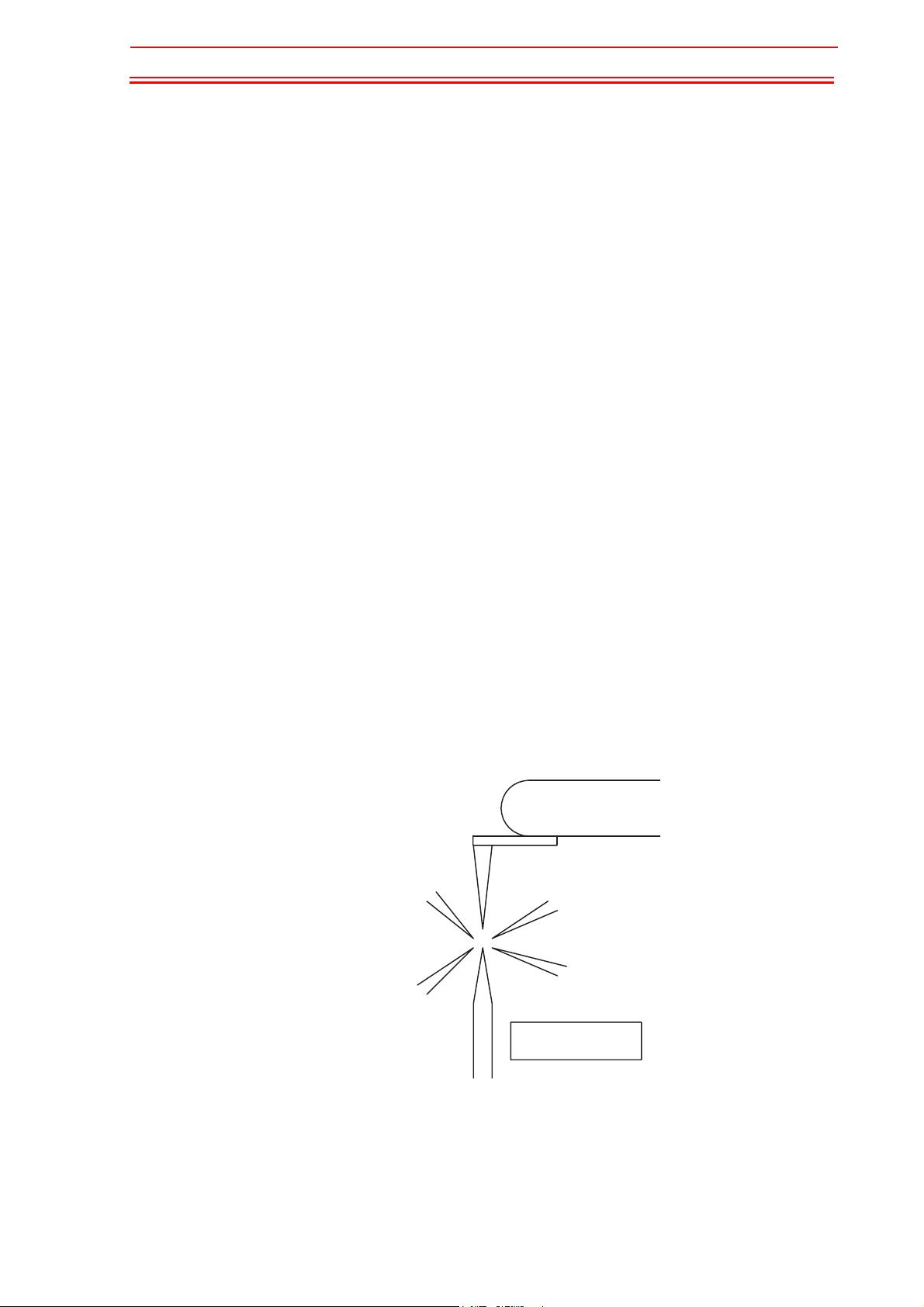
2. 推荐安装尖状的工具,并且工具的尖端部分在工具坐标的 X 轴或 Y 轴方向有偏移
( 推荐偏移量为 200mm )。
3. 使用此工具在 5 个位置各示教 5 个姿态不同的点 ( 合计 25 点 ),做一个程序名为
ROBOT 的程序。此程序要在通过 MOTOCALV32 进行机器人校准计算时使用。
示教方法如下。
1)同一工具在同一位置示教 5 个姿态不同的点。
(插补方式使用 MOVJ 或 MOVL。以示教的位置为基准计算内部的 XYZ 值。)
注 1:示教 K60 以上的大型机器人时,如果手腕姿态倾斜得太大,机器人手臂重力的挠
度会对校准产生影响,示教时手腕的倾斜度要在 45 度以下。K60 以下的机器人, 手腕
的倾斜度在 45 度以上。
注 2:如果实际再现时机器人手腕轴有反转 (机器人形态变化),请按此姿态示教。
5 点的姿态请参考下图。
2)在 5 个不同的位置进行如 1) 一样的 5 个姿态的示教。各点的距离要在 100mm 以上。
如果不能满足此条件,本功能不能正确运行。从左前上方到右后下方找 5 个点,分别进
ᴎ఼Ҏ
ޚᑣ
Ͼ࿓ᗕ
Ͼ࿓ᗕ
Ͼ࿓ᗕ
Ͼ࿓ᗕ
Ͼ࿓ᗕ

剩余14页未读,继续阅读
资源评论













