

224
附录 B 摄象机模型和外极线几何
B.1 摄象机模型
B.1.1 针孔模型和透视投影
B.1.2 摄象机外参数
B.1.3 摄象机内参数和归一化摄象机
B.1.4 透视矩阵的一般形式
B.2 透视投影的各种线性近似
B.2.1 正投影(orthographic projection)
B.2.2 弱透视(weak perspective)
B.2.3 平行透视(paraperspective projection)
B.2.4 仿射摄象机
B.3 透视投影下的外极线几何
B.3.1 外极线几何中的概念
B.3.2 归一化坐标系中的外极线方程
B.3.3 像素坐标系中的外极线方程
B.3.4 投影矩阵下的外极线方程
B.3.5 基础矩阵和外极几何变换
B.1 摄象机模型
在大部分应用环境中可以用理想的针孔模型来近似实际摄象机。针孔模型的几何关系就
是透视投影。下面我们先介绍透视投影的几何关系。
B.1.1 针孔模型和透视投影
针孔摄象机的模型在第五章中已有介绍。在那里我们使用了矢量代数的表示方法,下面
我们用坐标变换的方法来推导之。
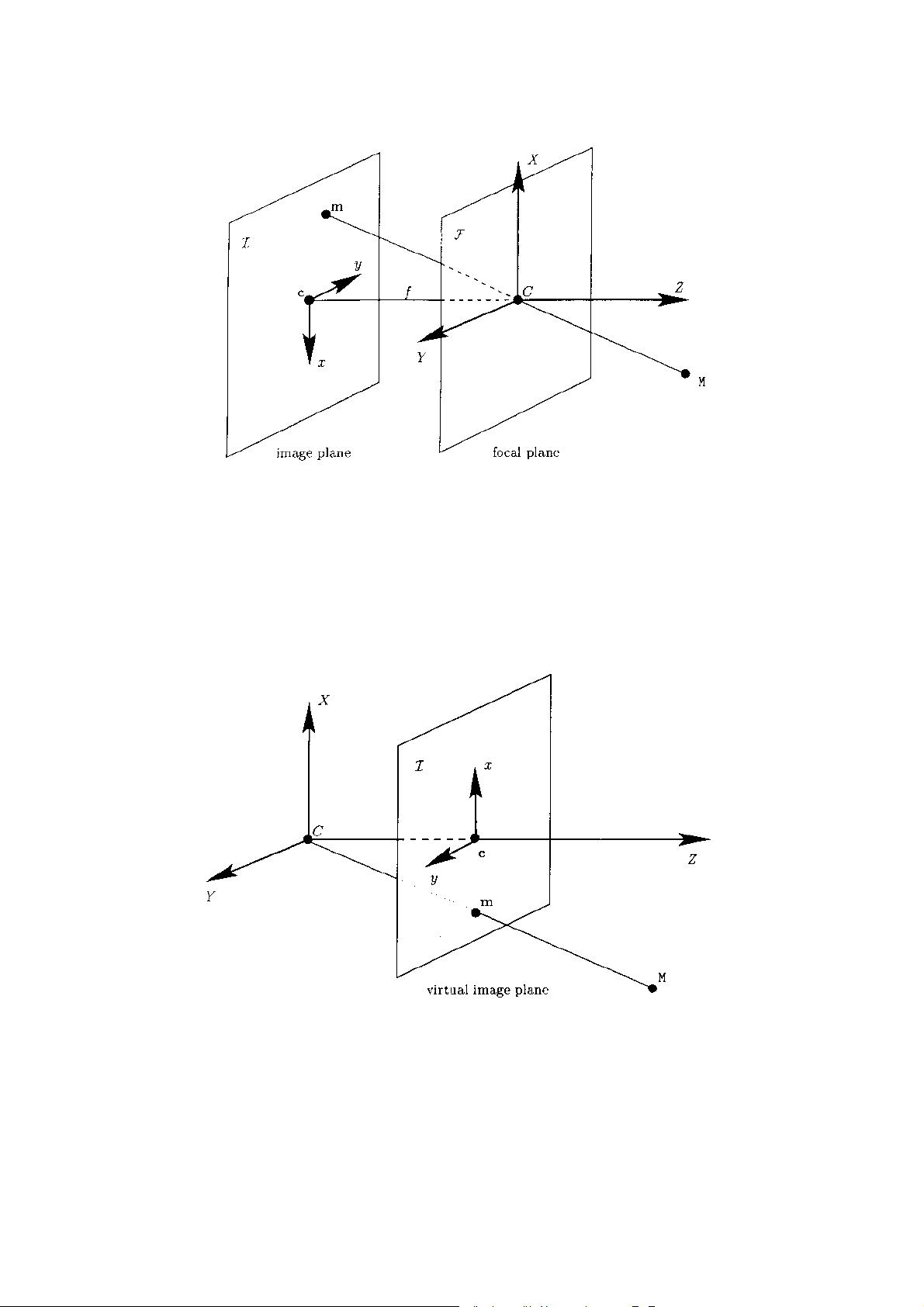
我们定义的第一个坐标系是摄象机坐标系。该坐标系的原点在焦心 C,X、Y、Z 轴由
A、H
’
和 V
’
决定,其中 A 为光轴方向,H
’
和 V
’
是正交的方向,三者组成右手直角坐标系。
三维点在该坐标系中的坐标 M
c
记为(X
c
,Y
c
,Z
c
)
T
。
为表示透视模型我们还需要在图象平面中建立图象坐标系。这是一个二维坐标系,其原
点位于光轴和图象平面的交点 c(称为主点,principal point),两坐标轴与 H
’
和 V
’
平行且反
向。在该坐标系中像点 m 的坐标表示为(u,v)
T
。
在定义了这两个坐标系后,投影模型可表示为
ccc
Z
f
Y
v
X
u
==
(B.1)
其中 f 为焦心到图象平面的距离,即焦距。
摄象机坐标系和图象坐标系如图 B.1 所示。

剩余16页未读,继续阅读
资源评论

 xsj11135851472013-10-21讲的 很基础,很好
xsj11135851472013-10-21讲的 很基础,很好- u0104124132015-09-27讲的很好,简单易懂
robotmfl
- 粉丝: 0
- 资源: 1











