
2
目 录
1.软件的安装、启动及向导 ......................................................................................................... 4
1. 1 安装软件 ........................................................................................................................ 4
1. 2 启动 CME2 软件 ............................................................................................................ 4
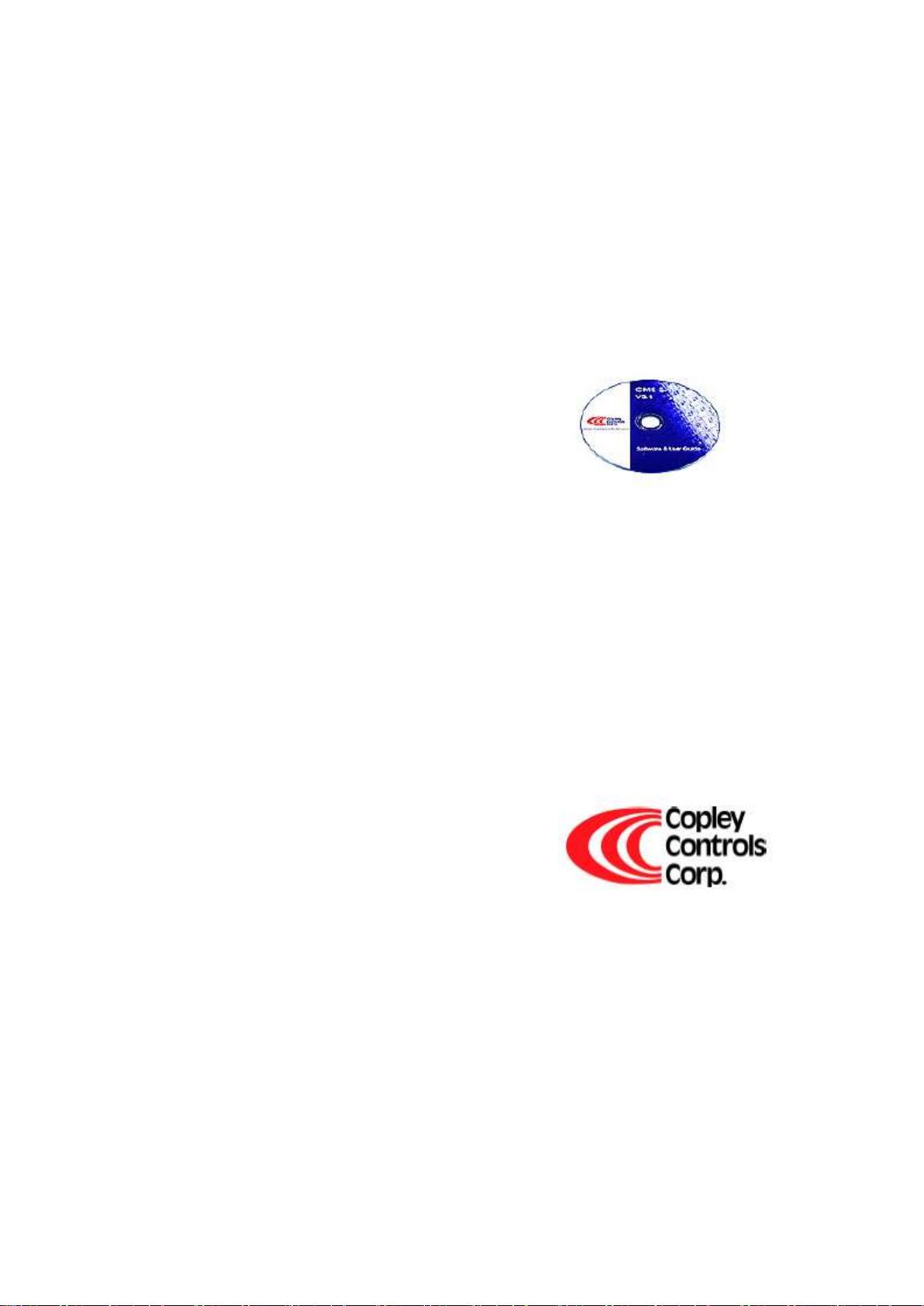
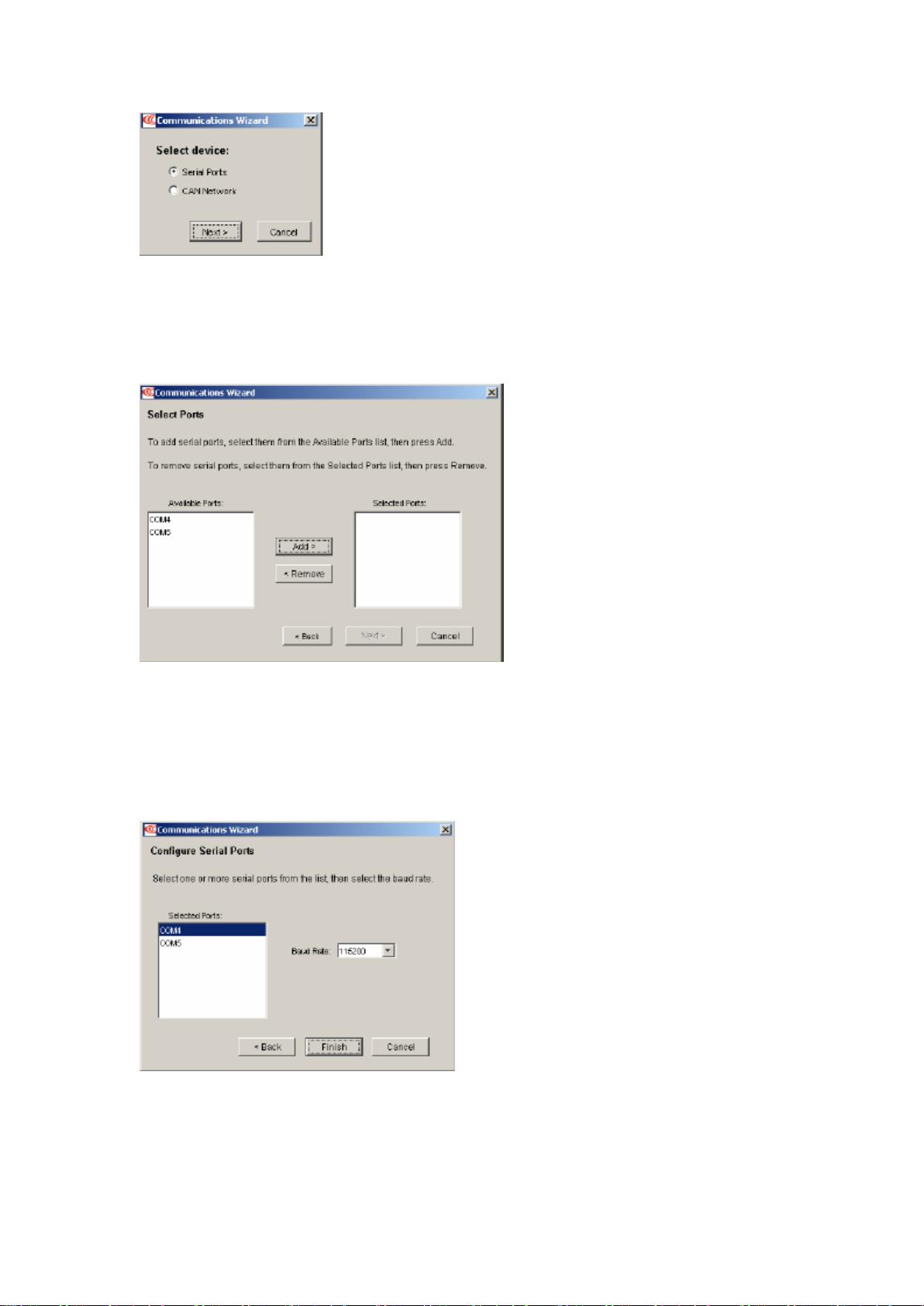
1. 3 串口设置 ........................................................................................................................ 4
1. 4 CAN 网络参数配置 ...................................................................................................... 6
1. 5 CME2 连接到驱动器 ................................................................................................... 6
1. 6 CME2 软件向导 ........................................................................................................... 7
2.基本配置 ..................................................................................................................................... 9
2.1 改变基本设置 ................................................................................................................. 9
2.2 ServoTube 电机配置 ................................................................................................... 12
3.电机/反馈参数配置 ................................................................................................................ 14
3.1 电机/反馈参数窗口概览 ............................................................................................. 14
3.2 旋转电机参数设置 ..................................................................................................... 14
3.3 直线电机参数设置 ..................................................................................................... 15
3.4 反馈参数,旋转电机 ................................................................................................. 16
3.5 反馈参数,直线电机 ................................................................................................. 17
3.6 反馈注意事项 ............................................................................................................. 17
3.7 Brake/Stop 参数 ......................................................................................................... 18
3.8 Brake/Stop 注意事项 ................................................................................................. 18
3.9 计算功能 ..................................................................................................................... 19
4.数字输入/输出配置.................................................................................................................. 21
4.1 数字输入 ..................................................................................................................... 21
4.2 数字输出 ..................................................................................................................... 23
4.3 同步 PWM 开关频率 .................................................................................................. 28
5.电机相位 ................................................................................................................................... 29
5.1 用 Auto Phase 整定电机相位 ................................................................................... 29
5.2 选择 Auto Phase 时 Current 和 Increment Rate 值向导 ........................................... 34
5.3 Auto Phase 过程中的微调 ......................................................................................... 34
5.4 用 Motor Phase Manually 整定电机相位 .................................................................. 35
6.控制面板 ................................................................................................................................... 40
6.1 Control Panel 概览 ..................................................................................................... 40
6.2 状态指示和消息 ......................................................................................................... 41
6.3 Control Panel 监控通道 ............................................................................................. 41
6.4 控制功能 ..................................................................................................................... 42
6.5 Jog 模式 ..................................................................................................................... 42
7.控制环路 ................................................................................................................................... 44
7.1 电流环设置和调试 ..................................................................................................... 44
7.2 电流环自动调节 ......................................................................................................... 46
7.3 电流模式和电流环的注意事项 ................................................................................. 48
7.4 速度环设置和调试 ..................................................................................................... 50
7.5 速度模式和速度环的注意事项 ................................................................................. 52
7.6 位置环设置和调试 ..................................................................................................... 54
















- 1
- 2
前往页