
Tracking Object based on GPS and IMU Sensor
Wahyudi
Department of Electrical Engineering
Diponegoro University
Semarang, Indonesia
wahyuditinom@elektro.undip.ac.id
Ngatelan
Department of Electrical Engineering
Diponegoro University
Semarang, Indonesia
ngatelan@undip.ac.id
Meita Sukma Listiyana
Department of Electrical Engineering
Diponegoro University Semarang,
Indonesia
meitasukma5@gmail.com
Sudjadi
Department of Electrical Engineering
Diponegoro University
Semarang, Indonesia
ksudjadi@gmail.com
Abstract—
Unmanned vehicles required a tracking system
to monitor the movement of the object. Tracking system
required because the object is controlled remotely and the
movement of an object is too far from an operator. This
tracking system requires object location and attitude. Global
Positioning System (GPS) and Inertial Measurement Unit
(IMU) sensor can be used to obtain information about object
location and attitude. This IMU consists of some sensors, i.e.
accelerometer, gyroscope, and magnetometer. In IMU system,
angle data from gyroscope and accelerometer sensor must be
combined using a complementary filter because each sensor
data still has a noise signal. This paper discusses tracking
object using GPS and IMU sensor and then processed by the
microcontroller to display in Personal Computer (PC). Object
tracking system that designed works well. The result of testing,
the average of error for GPS and IMU system, respectively, are
2.67 m and 0.96
o
.
Keywords— tracking system; GPS; IMU sensor; position and
attitude
I. I
NTRODUCTION
(H
EADING
1)
The increasing of unmanned vehicles or unmanned
objects, such as Unmanned Aerial Vehicle (UAV) and
Unmanned Surveillance Vehicle (USV), required a tracking
system to know the movement of the object[1]. Tracking
system required because the object is controlled remotely
and the movement of an object is too far from an operator.
This tracking system requires object location and attitude.
Object location indicated by latitude and longitude
coordinates where the object is placed, while attitude
indicated by roll, pitch, and yaw angle.
Global Positioning System (GPS) and Inertial
Measurement Unit (IMU) sensor can be used to obtain
information about object location and attitude[2]. IMU
consists of several sensors, such as accelerometer,
gyroscope, and magnetometer sensor[3]. Such of the sensors
provide information about data angle, data from each sensor
must be combined because each sensor data still has a noise
signal. The sensor data must be filtered with complementary
filter, so the result turned to good[4].
This paper discusses about tracking object using GPS and
IMU sensor; that object is static and moving. The obtained
data is processed by microcontroller, then sent to Personal
Computer (PC) using receiver and transmitter antenna of
433MHzfrequency radio. Tracking object is monitored by
PC in real time.
II. M
ETHODOLOGY
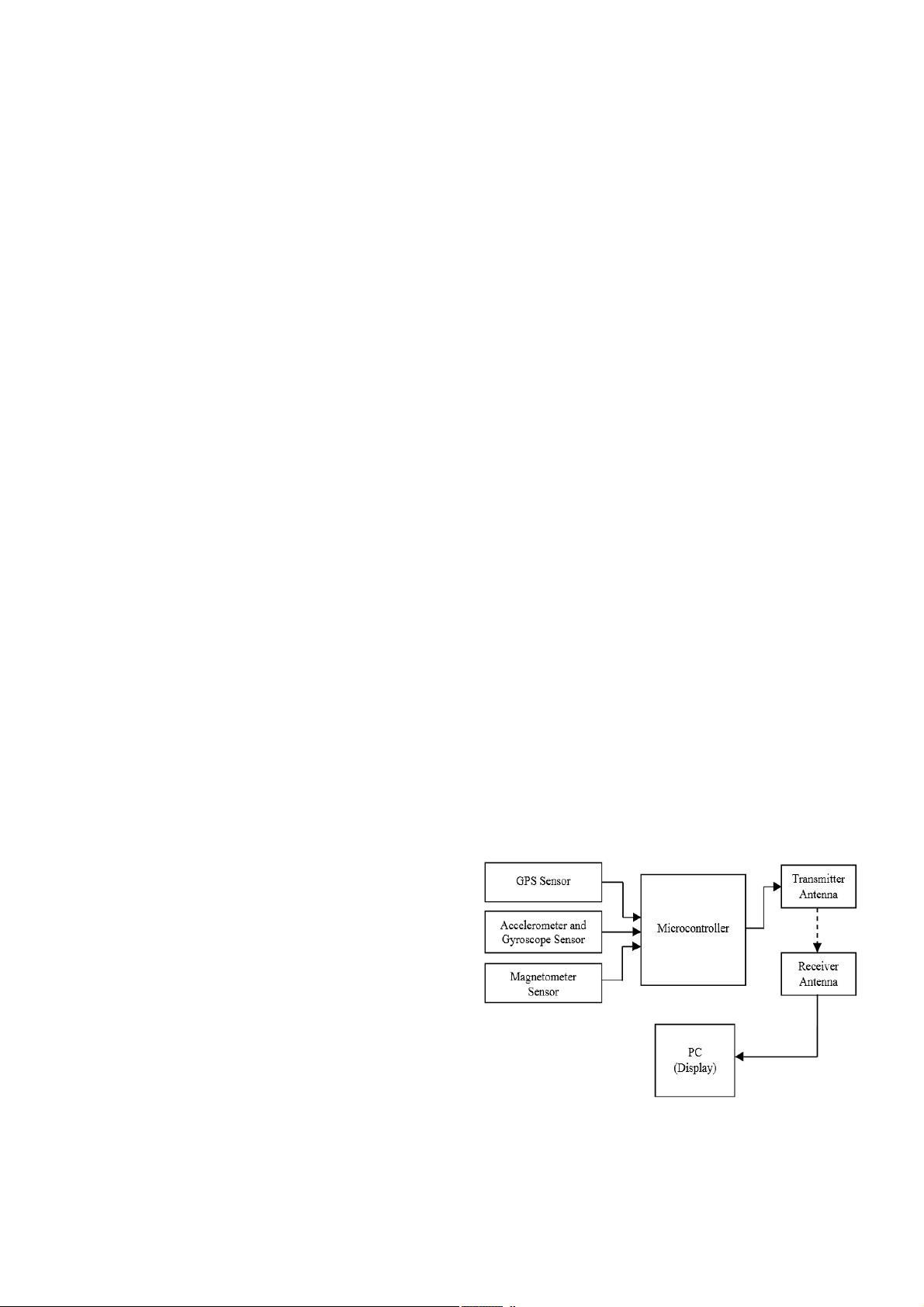
A. Block Diagram
The GPS, accelerometer, gyroscope, and magnetometer
sensor are used as input for the system. Microcontroller is
used to process input data. The output system is PC, receiver
and transmitter antenna of 433MHzfrequency radio. Block
diagram of tracking object is shown in Fig.1.
GPS is giving information about location for the object,
i.e. latitude and longitude coordinate. Accelerometer,
gyroscope, and magnetometer sensor are giving information
about attitude of the object, there are roll, pitch, and yaw
angle. Complementary filter is used to combine the sensor
data, because the sensor data still has a noise signal. The
data inputs of GPS, accelerometer, gyroscope, and
magnetometer are processed on microcontroller. Data inputs
are sent using the transmitter antenna of 433MHzfrequency
radio after processed by microcontroller, then received by
the receiver antenna of 433MHzfrequency radio. Finally, the
data are displayed on PC.
B. Design of Hardware Components
The assembly of hardware components from the tracking
object system is made by following components as shown in
Fig. 2.
Fig. 1. Block diagram of tracking object based on GPS and IMU
sensor
!
"#$$%&$"$''(%)
214
资源评论


AbelZ_01
- 粉丝: 1024
- 资源: 5440









最新资源
- 【全年行事历】5团建医药箱常备药清单.docx
- 【全年行事历】4团建活动物料清单.xlsx
- 【全年行事历】7团建活动策划书.docx
- 【全年行事历】ZOL团建活动策划方案.pptx
- 【全年行事历】XXX团建活动计划.pptx
- 【全年行事历】86团建活动培训PPT完.pptx
- 【全年行事历】公司年度活动计划.xls
- 【全年行事历】大型企业公司活动进度表.xlsx
- 【全年行事历】公司户外团建活动方案-某公司.pptx
- 【全年行事历】公司团建费用统计表.xlsx
- 【全年行事历】公司团建拓展行程方案-模版.docx
- 【全年行事历】公司全年团建活动方案.xls
- 【全年行事历】公司员工一年度关怀方案预算.xls
- 【全年行事历】公司团建活动项目介绍.pptx
- 【全年行事历】行政部年度活动策划及经费预算.xlsx
- 【全年行事历】行政全年活动筹备规划.xlsx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


