基于51单片机的超声波跟随小车,包含原理图

需积分: 0 162 浏览量
更新于2023-05-17
6
收藏 119KB PDF 举报
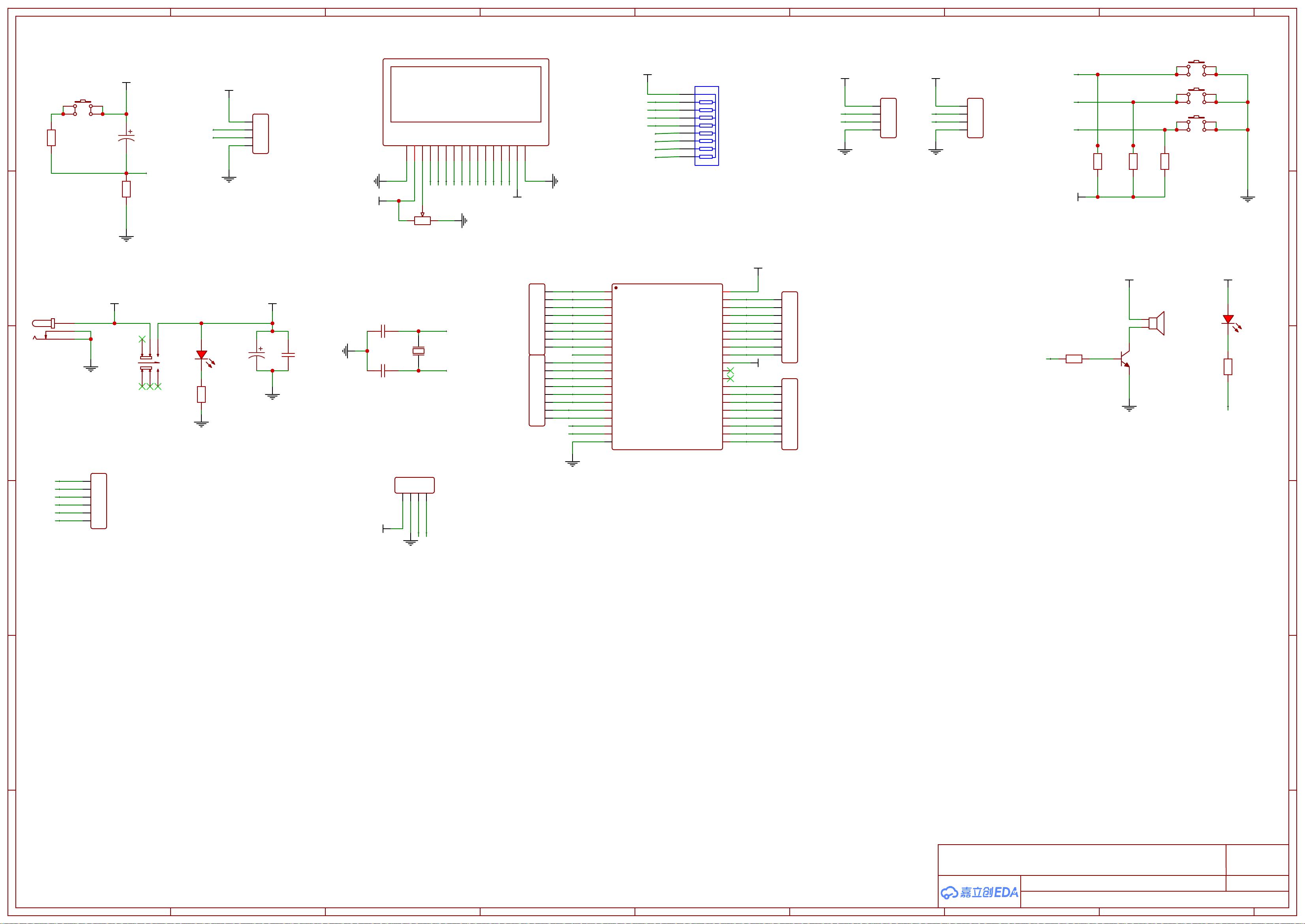
本文将详细介绍一个基于51单片机的超声波跟随小车的设计和工作原理。51单片机,全称为STC89C52RC,是这个项目的核心控制器,它具有8位微处理器,能够处理传感器数据并控制小车的行为。
在小车的设计中,超声波传感器(如HC-SR04)被用作主要的检测模块。超声波传感器通过发送和接收超声波脉冲来测量与前方物体的距离。其工作原理是发射超声波,然后计算从发射到接收到反射回波的时间,根据声速可以计算出距离。超声波传感器的P1.0、P1.1、P1.2、P1.3等引脚可能被用来连接到51单片机,用于发送和接收信号。
小车的行驶策略基于距离测量的结果。当小车与目标物体的距离大于预设的跟随距离时,51单片机会控制小车前进,确保小车保持在目标物体的一定范围内。如果小车接近目标,与目标的距离小于停止距离,51单片机会命令小车停止,防止碰撞。而在更近的报警距离下,小车会触发声光报警,同时后退以保持安全距离。这里的报警系统可能由蜂鸣器(BUZZER)和LED灯组成,通过P2.0至P2.7等引脚控制。
电路设计中,51单片机的P0、P1、P2、P3端口用于连接不同的功能模块,如电机驱动模块、液晶显示屏(LCD1602)、按键控制等。P3.0和P3.1作为串行通信接口,可能用于连接蓝牙模块,实现远程控制或数据传输。此外,电路中还包括复位电路,用于在需要时重置单片机。电源部分,5V直流电源为系统供电,而10uF电容和10kΩ电阻可能用于电源滤波和启动电路。
时钟电路由晶体振荡器(如12MHz的X1)和30pF电容(C1、C2)组成,为51单片机提供稳定的时钟信号。烧录接口(如HDR-F-2.54_1x4H)则用于编程和调试51单片机。
这个基于51单片机的超声波跟随小车项目结合了硬件电路设计和嵌入式软件编程,通过超声波传感器实现避障和目标跟随功能,利用51单片机的处理能力,构建了一个智能化的小车控制系统。设计者需要具备电子电路、嵌入式系统和传感器应用等相关知识,才能成功实现这样的项目。
A A
B B
C C
D D
E E
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
TITLE:
measure-radar
REV: 1.0
Date:
2023-03-28
Sheet:
1/1
Drawn By:
Company:
Your Company
STC89C52RC-40I
U1
T2/P1.0
1
T2EX/P1.1
2
P1.2
3
P1.3
4
P1.4
5
P1.5
6
P1.6
7
P1.7
8
RST
9
RXD/P3.0
10
TXD/P3.1
11
INT0#/P3.2
12
INT1#/P3.3
13
T0/P3.4
14
T1/P3.5
15
WR#/P3.6
16
RD#/P3.7
17
XTAL2
18
XTAL1
19
GND
20
P2.0
21
P2.1
22
P2.2
23
P2.3
24
P2.4
25
P2.5
26
P2.6
27
P2.7
28
PSEN#
29
ALE
30
EA#
31
P0.7
32
P0.6
33
P0.5
34
P0.4
35
P0.3
36
P0.2
37
P0.1
38
P0.0
39
VCC
40
+5V
10uF
C1
GND
RST
LCM1602K-NSW-BBW
LCD1
VSS
1
VDD
2
V0
3
RS
4
R/W
5
EN
6
DB0
7
DB1
8
DB2
9
DB3
10
DB4
11
DB5
12
DB6
13
DB7
14
A+
15
K-
16
LCM1602K-NSW-BBW
GND
GND
+5V
+5V
10k
RP1
GND
P27
P00
P01
P02
P03
P04
P05
P06
P07
10K
RP2
1
2
3
4
8
7
6
5
9
+5V
P00
P01
P02
P03
P04
P05
P06
P07
复位电路
LCD液晶屏
液晶屏上拉电阻
VCC
DC-005A-20A
DC1
3
2
1
GND
330
R2
GND
1u
C4
104
C5
GND
+5V
5V直流电源
+5V
GND
P32
P33
超声波测距模块
10k
R3
10k
R4
10k
R5
+5V
GND
按键控制
+5V
+5V
LED-0603_R
LED1
1k
R6
330
R7
GND
BUZZER-12X9
BUZZER1
+
P20
P21
P22
P23
P24
声光报警
XTAL1
XTAL2
GND
RST
RXD
TXD
P32
P33
P34
P35
TTL_TXD
TTL_RXD
+5V
P00
P01
P02
P03
P04
P05
P06
P07
P27
P20
P21
P22
P23
P24
P25
P26
+5V
P35
P34
GND
+5V
10k
R0
10k
R1
SS8050
Q2
P10
P11
P12
P13
P14
P15
P16
P17
P26
P25
P10
P11
P12
P13
P14
P15
电机驱动模块
+5V
GND
TTL_TXD
TTL_RXD
蓝牙模块
MCU
STC89C52
L298N
J1
1
2
3
4
5
6
HC-SR04
J2
1
2
3
4
HC-SR04
J4
1
2
3
4
KEY1
1
2
3
4
KEY2
1
2
3
4
KEY3
1
2
3
4
KEY4
1
2
3
4
HDR-F-2.54_1x4
H2
1
2
3
4
J3
1
2
3
4
5
6
7
8
J5
1
2
3
4
5
6
7
8
HDR-M-2.54_1x8
J6
1
2
3
4
5
6
7
8
HDR-M-2.54_1x8
J7
1
2
3
4
5
6
7
8
GND
VCC
RXD
TXD
烧录接口
GND
30pF
C3
时钟电路
12MHz
X1
30pF
C2
XTAL1
XTAL2
SW1
1
2
3
4
5
6
电源指示
LED2
HDR-F-2.54_1x4
H1
1
2
3
4
下载后可阅读完整内容,剩余0页未读,立即下载
194 浏览量
124 浏览量
118 浏览量
125 浏览量
2022-05-26 上传
129 浏览量
2024-04-29 上传
148 浏览量
2019-08-25 上传
101 浏览量
193 浏览量
2021-04-03 上传
141 浏览量
114 浏览量
193 浏览量
资源评论


Fly川
- 粉丝: 658
- 资源: 2









最新资源
- 流水线自动锁付螺丝方案sw18可编辑全套技术资料100%好用.zip
- C# ModbusRtu或者TCP协议上位机源码,包括存储,数据到SQL SERVER数据库,趋势曲线图,数据报表,实时和历史报警界面,有详细注释,需要哪个协议版本
- (3918228)C#记事本源代码只供交流
- (40706850)C语言程序设计实训 基于链表的学生信息管理系统
- 23年秋季期末考试复习资料.zip
- (41908830)springboot校园闲置物品交易网站毕业设计.zip
- (488458)记事本+源代码
- selenium-4.27.0
- FPGA pci代码,模块完整,注释完整
- (5331616)数学建模十大算法(程序详解)
- (68819422)2442基于单片机的电子密码锁教学应用Proteus仿真.zip
- ERP系统日常人力服务方案.pptx
- 电子凸轮追剪曲线生成算法 品牌:麦格米特(算法,理解后可转成其他品牌PLC或任何一种编程语言) 只有程序
- selenium-4.2.1
- 锂电池等效电路模型二阶RC模型二阶戴维南模型
- selenium-4.0.0
