发那科机器人PR指令.docx
版权申诉
131 浏览量
2023-02-27
21:08:36
上传
评论
收藏 60KB DOCX 举报

发那科机器人 PR 指令
整理为 word 格式
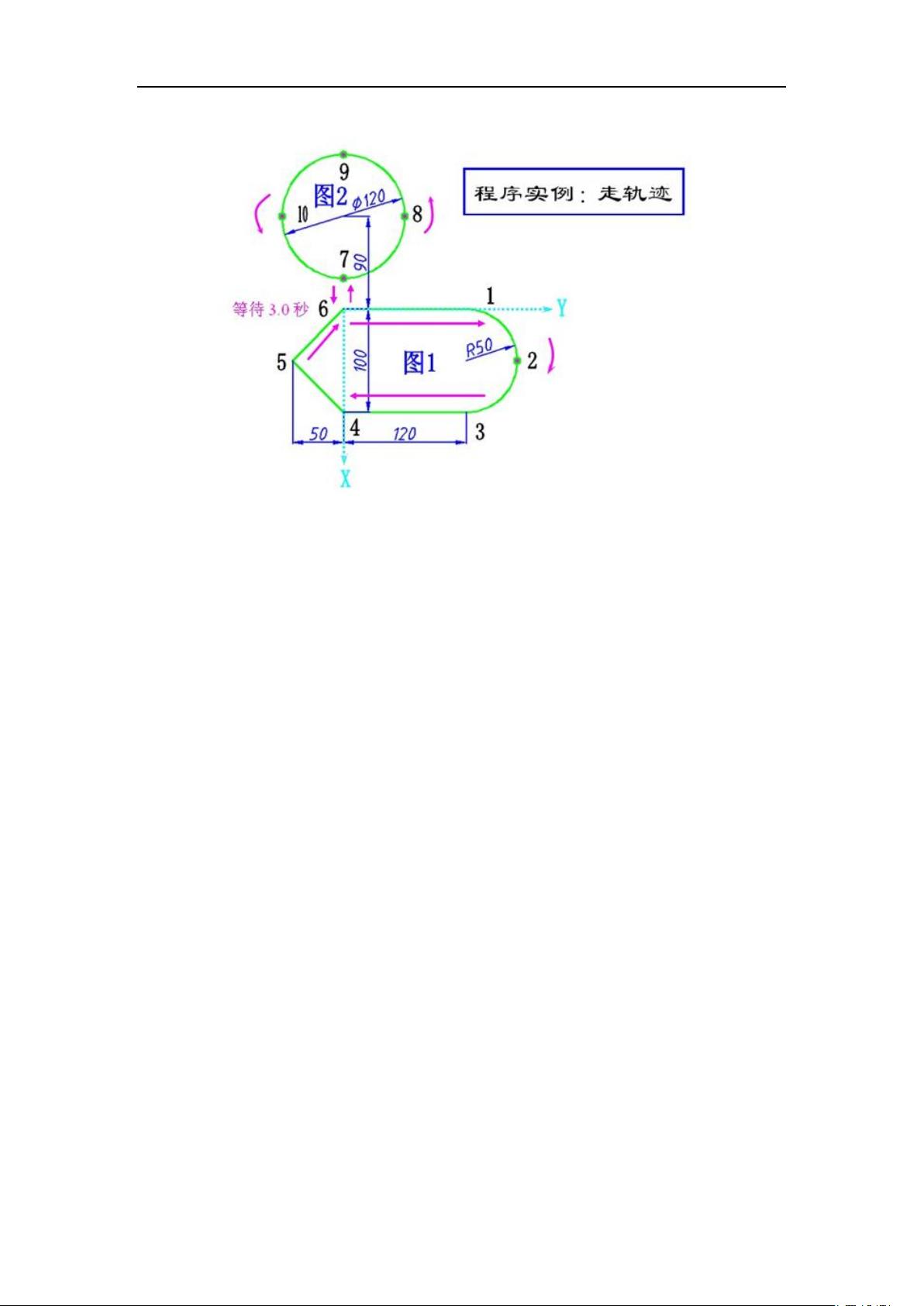
PS:1→2、2→3、7→8、8→9、9→10、10→7 为圆弧运动; 6→1、3→4、4→5、
5→6、6→7、7→6 为直线运动; 先画图 1,循环 3 次,等待 3 秒,再画图 2,轨迹如
上图所示。10 个位置在同一平面。程序(位置寄存器法:建立坐标系,指定位置具体坐
标):
程序行 指令 注释
1 PR[6]=LPOS 以位置 6 为原点
2 PR[1]=PR[6] 将位置 6 赋值给位置 1
3 PR[1,2]=PR[6,2]+120 位置 1:以位置 6 为基准,其 Y 方向+120
4 PR[2]=PR[1] 将位置 1 赋值给位置 2
5 PR[2,1]=PR[1,1]+50 位置 2:以位置 6 为基准,其 Y 方向+50
6 PR[2,2]=PR[1,2]+50 位置 2:以位置 6 为基准,其 X 方向+50
7 PR[3]=PR[1] 将位置 1 赋值给位置 3
8 PR[3,1]=PR[1,1]+100 位置 3:以位置 1 为基准,其 X 方向+100
9 PR[4]=PR[3] 将位置 3 赋值给位置 4
10 PR[4,2]=PR[3,2]-120 位置 4:以位置 3 为基准,其 Y 方向-120
11 PR[5]=PR[2] 将位置 2 赋值给位置 5
12 PR[5,2]=PR[2,2]-220 位置 5:以位置 2 为基准,其 Y 方向-220
13 PR[6]=PR[1] 将位置 1 赋值给位置 6
14 PR[6,2]=PR[1,2]-120 位置 6:以位置 1 为基准,其 Y 方向-120
15 R[1]=0 程序 1 初始值为 0
16 LBL[1] 程序 1 分支标签
资源评论


是空空呀
- 粉丝: 171
- 资源: 3万+









最新资源
- Pytorch-pytorch深度学习教程之前馈神经网络.zip
- Pytorch-pytorch深度学习教程之线性回归.zip
- Pytorch-pytorch深度学习教程之基本操作.zip
- 基于QT的地图可视化桌面系统后台数据库为MySQL5.7源码.zip
- 基于simulink的PLL锁相环系统仿真【包括模型,文档,参考文献,操作步骤】
- 基于EM-GMM模型的目标跟踪和异常行为检测matlab仿真【包括程序,注释,参考文献,操作步骤,说明文档】
- 2109010044_胡晨燕_选课管理数据库设计与实现.prj
- 帕鲁介绍的PPT备份没什么好下的
- demo1-202405
- 两种方式修改Intel网卡MAC地址
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


