KUKA机器人仿真 KUKA机器人仿真全文共50页,当前为第1页。 学习内容: 认识KUKA仿真软件 学习KUKA仿真软件的一些基本操作 简易仿真砂芯搬运系统 KUKA机器人仿真全文共50页,当前为第2页。 学习目的: 了解KUKA仿真软件 掌握KUKA仿真软件的基本操作 能够运用KUKA仿真软件进行简易的系统仿真 KUKA机器人仿真全文共50页,当前为第3页。 简易搬运系统仿真 1. 打开KUKA仿真软件,打开后如下图: KUKA机器人仿真全文共50页,当前为第4页。 2. 导入所需工件,步骤如下: (1)点击File,选择Import,导入所需工件; KUKA机器人仿真全文共50页,当前为第5页。 (2) 选择工件时,选择文件类型如下图: KUKA机器人仿真全文共50页,当前为第6页。 (3) 选择所需工件,然后点击打开,如下图: KUKA机器人仿真全文共50页,当前为第7页。 (4) 导入工件后如下图: KUKA机器人仿真全文共50页,当前为第8页。 3. 选择所需要的KUKA机器人,步骤如下: (1) 在eCate选项卡下,点击Local Components KUKA Roboter文件夹 Robotes文件夹 Heavy Payloads 选择型号为KR500 L420/1的机器人; KUKA机器人仿真全文共50页,当前为第9页。 (2)导入机器人后如下图: KUKA机器人仿真全文共50页,当前为第10页。 4. 把夹具安装到法兰盘上; (1)选择Trans按钮,移动夹具至法兰盘附近; (2)然后点击PnP,左键点住夹具,继续在法兰盘附近移动夹具,直至 出现一条绿线后,继续移动夹具,移动到一点夹具会定住,此时释放左 键,会出现浅蓝色宽状箭头,此时表示夹具要安装到法兰盘上,点击 Select即可完成,如下图: KUKA机器人仿真全文共50页,当前为第11页。 出现绿色线: KUKA机器人仿真全文共50页,当前为第12页。 出现浅蓝色宽状箭头: KUKA机器人仿真全文共50页,当前为第13页。 (3)移动夹具至合适位置,如下图: KUKA机器人仿真全文共50页,当前为第14页。 5. 导入传送架,步骤如下: (1)在eCate选项卡下,点击Local Components general文件夹 Conveyors文件夹 选择 Conveyors RotatorL; KUKA机器人仿真全文共50页,当前为第15页。 (2)在Para选项卡下,点击General,设置ConveyorLength为10000.00,设置ConveyorWidth为1200.00,如下图: KUKA机器人仿真全文共50页,当前为第16页。 (3)导入传送架后如下图: KUKA机器人仿真全文共50页,当前为第17页。 6. 把砂箱放于一个传送架上,砂芯放于另一个传送架上,如下图: KUKA机器人仿真全文共50页,当前为第18页。 7.设置机器人的移动路径,步骤如下: (1)选择Teach选项卡,点击 图标,确定当前点的位 置,如下图: KUKA机器人仿真全文共50页,当前为第19页。 (3)移动机器人后的位置如图: (2)点击如下图标来移动机器人,然后确定当前位置; KUKA机器人仿真全文共50页,当前为第20页。 8. 机器人夹起砂芯,步骤如下: (1)机器人移到如下位置: KUKA机器人仿真全文共50页,当前为第21页。 (2)新建一个tool,如下图: KUKA机器人仿真全文共50页,当前为第22页。 (3)在Tool栏里,点击 ,然后点击Translate,如下图: KUKA机器人仿真全文共50页,当前为第23页。 (4)移动座标到如下位置: KUKA机器人仿真全文共50页,当前为第24页。 (5)点击 按钮,然后点击 ,如下图: KUKA机器人仿真全文共50页,当前为第25页。 (6)点下砂芯,,然后点击PnP,然后再点下 ,如下图: KUKA机器人仿真全文共50页,当前为第26页。 (7)然后再点下抓具,会出现宽状箭头,如下图: KUKA机器人仿真全文共50页,当前为第27页。 (8)点击Select后,砂芯就可以随机器人移动了,如下图: KUKA机器人仿真全文共50页,当前为第28页。 9. 设置路径,把砂芯放入砂箱,然后点击 ,把Value改为false,如下图: KUKA机器人仿真全文共50页,当前为第29页。 10.设置完路径,回到砂芯开始放置的位置,点击 ,然后点下砂芯,选择PnP,然后再点下 ,之后再点下垫板,如下图: KUKA机器人仿真全文共50页,当前为第30页。 11. 如上设置,砂芯就可以脱离夹具了,如下图: KUKA机器人仿真全文共50页,当前为第31页。 12.接下来设置砂箱在传送架上运动,步骤如下: (2)
KUKA机器人仿真是一项重要的技能,特别是在工业自动化和机器人技术领域。KUKA是一家德国公司,以其先进的工业机器人和自动化解决方案而闻名。本教程旨在帮助学习者掌握如何使用KUKA的仿真软件进行机器人系统的模拟操作,特别是针对简易的砂芯搬运系统。
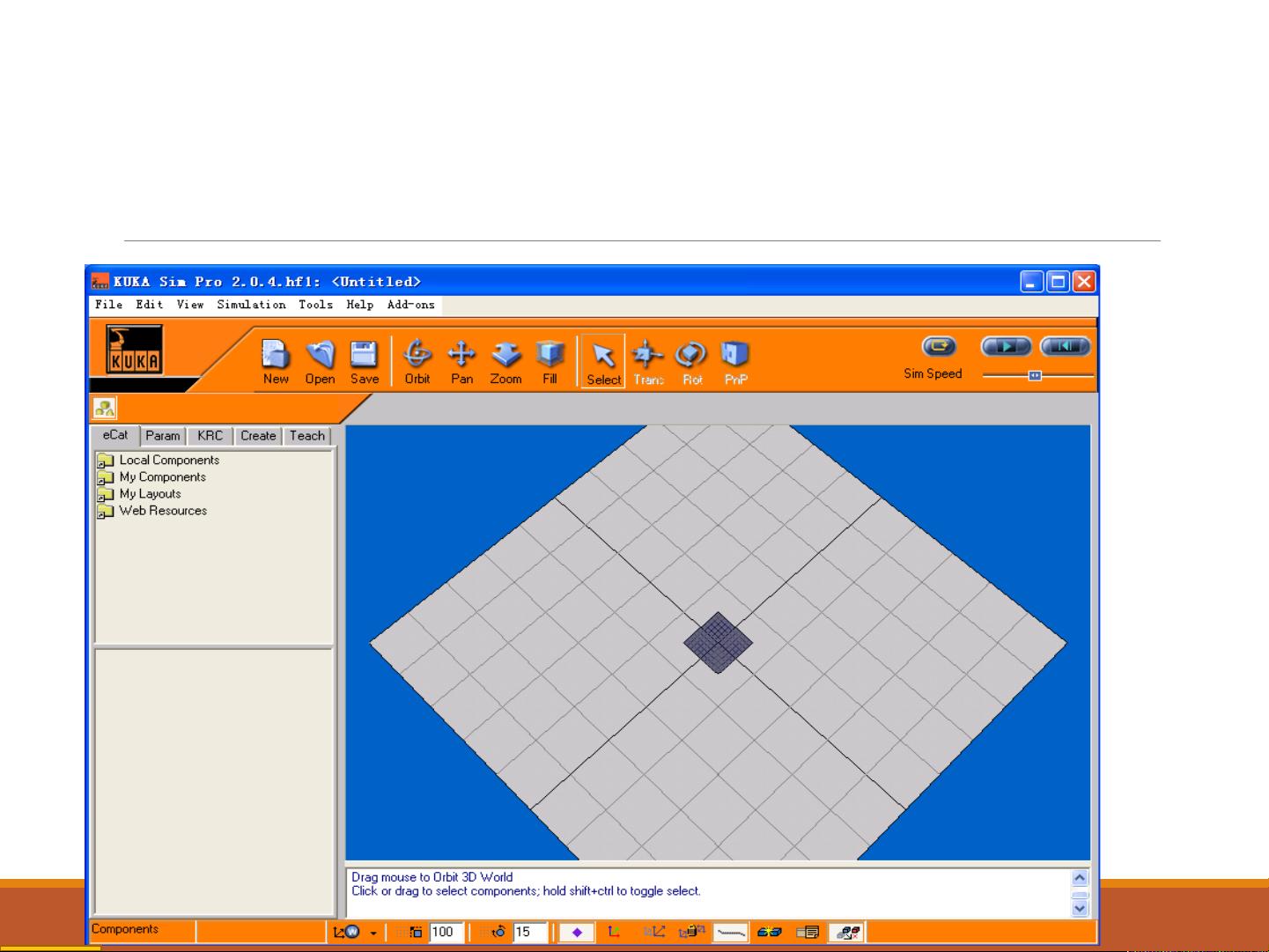
学习者需要了解KUKA的仿真软件,这是一款强大的工具,允许用户在实际操作前对机器人工作流程进行预设和测试。通过仿真,可以避免潜在的错误,提高生产效率和安全性。软件的基本操作包括文件的导入、机器人的选取以及工件和设备的配置。
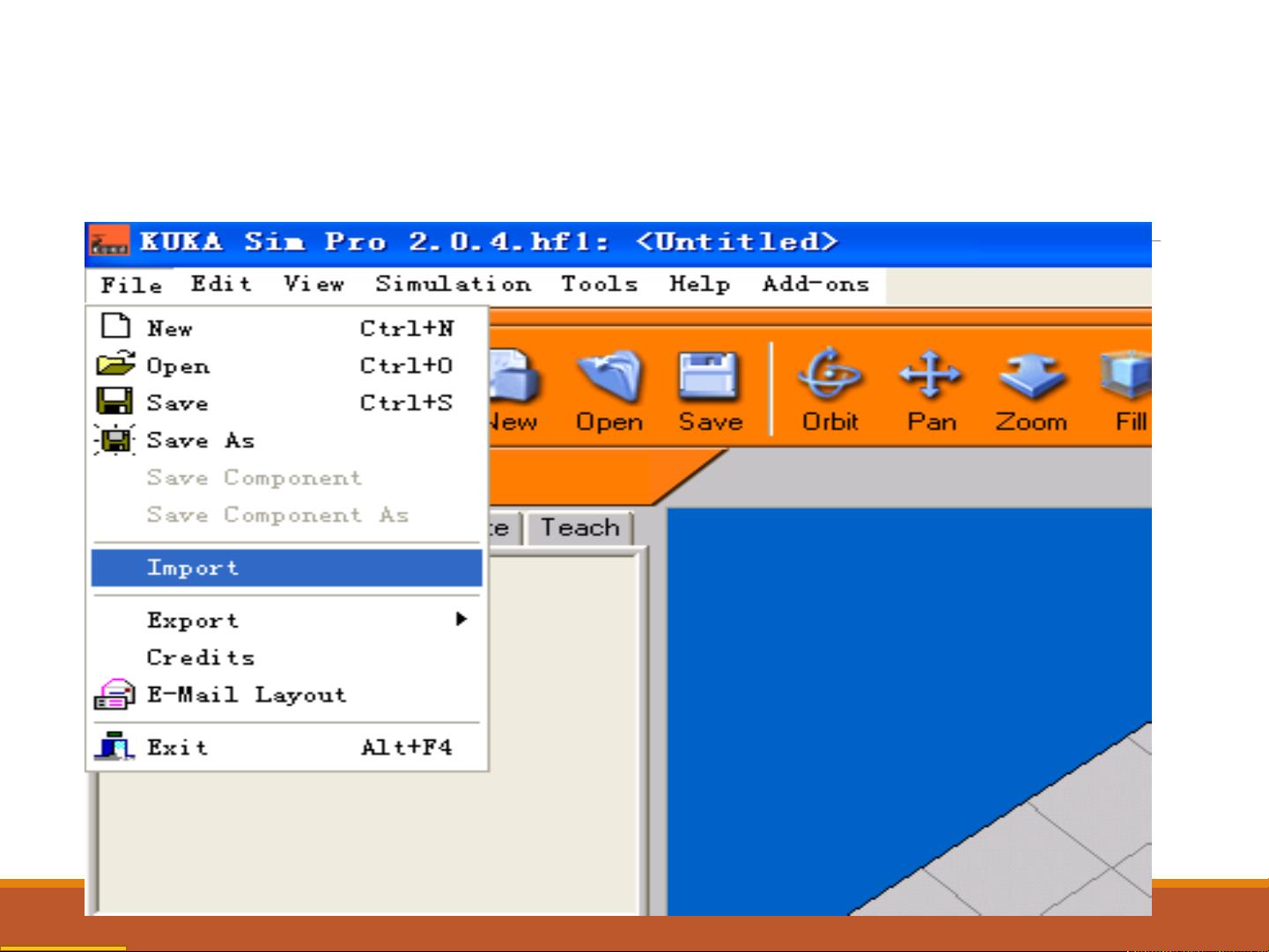
在导入工件的过程中,用户需通过"File"菜单选择"Import",并按照指定的文件类型导入所需的3D模型,例如砂箱或砂芯。接着,选择合适的KUKA机器人,例如KR500 L420/1,这是一个大负载的机器人模型,适合重型搬运任务。将夹具安装到法兰盘上时,需利用"Trans"按钮移动到正确位置,并通过"PnP"功能实现精确对准和固定。
传送架的设置是系统中的关键部分,它模拟了实际生产线上的物料输送。用户需要从"Local Components"的"Conveyors"文件夹中选择适当的传送带类型,如"RotatorL",并调整其长度和宽度以适应场景需求。
设置机器人的移动路径至关重要,通过"Teach"选项卡可以教学机器人到达特定位置。用户点击相应的图标移动机器人并记录坐标,创建出完整的搬运路径。在操作过程中,机器人会使用夹具抓取砂芯,这涉及新建工具、坐标转换和"Pick & Place"操作,确保砂芯安全稳定地被拾取和放置。
通过设置路径,机器人能将砂芯准确放入砂箱,并通过调整参数控制传送带的运动,以实现砂芯在不同位置之间的自动转移。整个过程中,用户需熟练掌握软件界面和各项功能,以实现高效、精准的机器人仿真操作。
总结来说,KUKA机器人仿真是一个涵盖多步骤、多技能的学习过程,涵盖了从环境搭建、机器人选取、路径规划到物体搬运的全方位操作。通过深入学习和实践,用户能够掌握这一高级技能,为实际的工业应用做好准备。