KUKA工业机器人坐标系介绍.pdf
版权申诉

KUKA⼯业机器⼈坐标系介绍⼯业机器⼈坐标系介绍
KUKA 机器⼈的坐标系可分为四种:机器⼈的坐标系可分为四种:
1. JOINT坐标系统 : 每个设备轴线在正负⽅向上可以单独移动。
2. WORLD坐标系统 :固定的,直⾓坐标系统其原点位于设备的底座。
3. BASE坐标系统 :直⾓坐标系统其原点位于所加⼯的⼯件上。
4. TOOL坐标系统 :直⾓坐标系统,其原点位于⼯具上。
KUKA机器⼈微动模式的选择可分为两种:机器⼈微动模式的选择可分为两种:
参考坐标系只能在微动模式下改变。
1. 在左上⾓显⽰的“Jog mode”(微动模式)状态键必须显⽰“Space mouse⼿
轮”或者“Jog keys微动键”
2. 选择所需求的坐标系---重复按下下图所指⽰KCP上的状态键直到出现所要求的
坐标系符号为⽌。
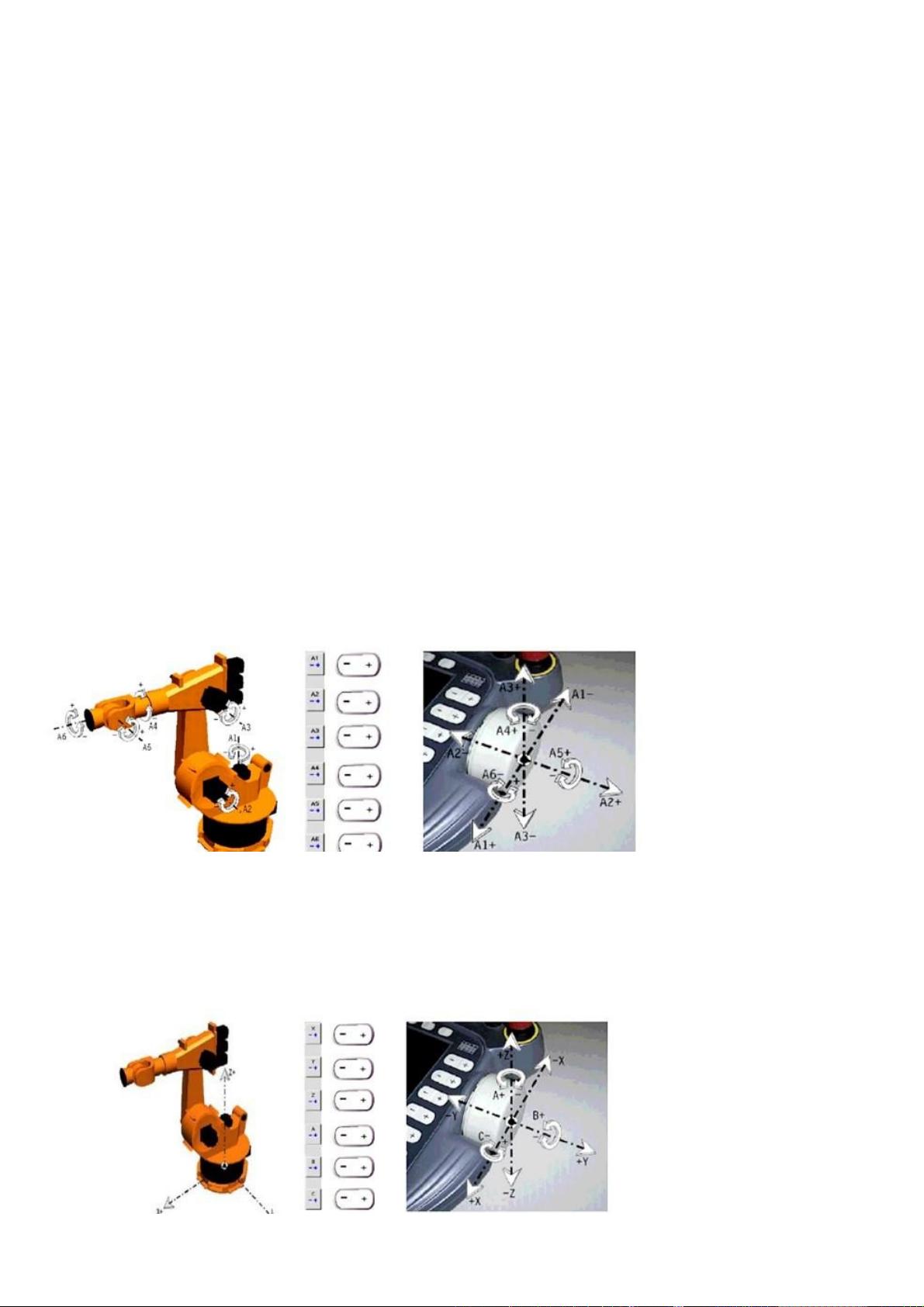
JOINT坐标系统坐标系统
在JOINT坐标中,每⼀机械轴线可以单独在轴线的正负⽅向移动。可以使⽤微动键或
⼿轮。 ⼿轮允下列微动键/⼿轮的运动能使每个轴线单独移动。
WORLD坐标系坐标系
WORLD参考坐标轴系统是绝对坐标(固定不变),直⾓坐标,笛卡⼉坐标系,其原
点⼀般于⼯件内部。当设备移动时参考坐标系的原点保持在同⼀位置,既不随设备
移动⽽移动。 在交货时,WORLD 坐标系原点位于设备的底座上。
资源评论

 牛井2024-04-18资源很实用,内容详细,值得借鉴的内容很多,感谢分享。
牛井2024-04-18资源很实用,内容详细,值得借鉴的内容很多,感谢分享。

是空空呀
- 粉丝: 171
- 资源: 3万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











