在探讨基于Simulink和Matlab对自动驾驶汽车进行功能性开发的知识点之前,我们需要对自动驾驶汽车的技术背景有一个初步的了解。自动驾驶汽车技术主要涉及感知、规划、控制等关键环节,这些环节共同协作以实现车辆的自主驾驶。Simulink作为MathWorks公司的一款用于模拟和多域设计的图形化环境,广泛应用于系统、控制和信号处理的设计和仿真中,是自动驾驶开发中不可或缺的工具。
通过Matlab和Simulink联合仿真,开发者可以进行算法的设计和验证,这包括但不限于以下几个方面:
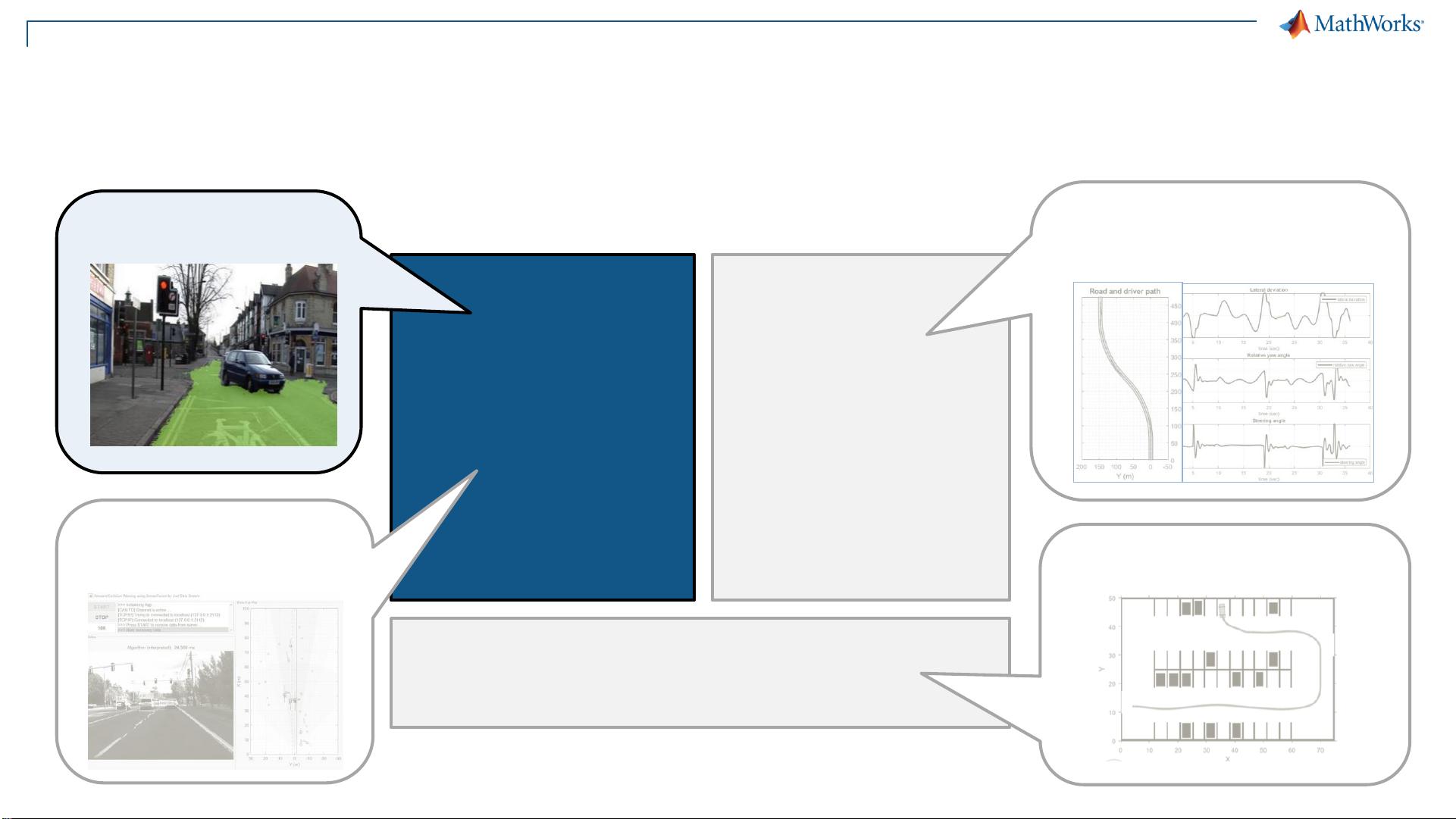
1. 感知(Perception):感知指的是自动驾驶汽车通过各种传感器获取周围环境信息,并对这些信息进行处理和理解。典型的传感器包括摄像头、雷达、激光雷达(LiDAR)等。利用Matlab中的计算机视觉系统工具箱(Computer Vision System Toolbox™),可以对图像数据进行载入、显示和处理。深度学习技术,如卷积神经网络(CNN),在视觉数据处理中的应用也越来越广泛。此外,实时数据处理中使用深度学习进行传感器融合,可以提高感知的准确性和鲁棒性。
2. 控制(Control):控制环节指的是根据感知到的环境信息,自动驾驶系统决定车辆的动态行为,如转向、加速度等。这一环节涉及到控制理论、动力学以及汽车动态模型。在Matlab中,模型预测控制(MPC)是一种常用的控制策略,能够预测未来的动态行为,并优化当前的控制动作,以适应复杂的驾驶环境和避免潜在的风险。
3. 规划(Planning):规划是指确定自动驾驶汽车在特定时间段内的运动轨迹和速度,它包括路径规划和行为规划。路径规划考虑车辆的运动学约束,选择出一条避开障碍物并满足行驶安全和舒适性的路径。行为规划则负责决策,如超车、避障等。Simulink提供了多种工具和模块来模拟这些规划功能,使得自动驾驶系统的规划能力可以被测试和验证。
4. 自动驾驶系统工具箱(Automated Driving System Toolbox™):为了支持自动驾驶开发,Matlab提供了一个专门的工具箱,它提供了一系列的函数和应用程序接口(API),用于处理自动驾驶相关的数据集、标注、算法设计和验证。例如,可以使用真实值标注程序(Ground Truth Labeler)对视频数据进行标注,定义区域的子标签和属性,以及自动标注像素点。此外,还可以对深度学习网络进行训练,以检测可行驶区域、行人、车辆等。
5. 训练深度学习网络:Matlab中的深度学习工具箱(Deep Learning Toolbox™)允许研究人员和开发人员训练神经网络来识别和分类图像数据中的对象。通过深度学习训练,可以实现复杂的模式识别任务,这对于自动驾驶车辆的感知能力至关重要。在深度学习网络的训练过程中,可能需要处理不均衡的数据集问题,即某些类别数据的标注像素点分布不均。为此,Matlab提供了创建加权层(weighted layers)的功能,通过调整不同类别的权重来补偿不均衡,从而提高模型的泛化能力。
6. 可视化与数据管理:Matlab提供了强大的数据可视化功能,这对于算法开发和验证过程中的分析和调试具有重要意义。例如,使用Matlab可以轻松地可视化标注图像和像素点的分布,这对于理解数据集的特性以及训练网络时评估模型性能都非常重要。对于大型图像数据集的管理,Matlab的数据存储(datastore)功能允许用户高效地管理和操作大数据。
7. 深度学习网络的创建和可视化:在自动驾驶的感知任务中,创建一个深度学习网络来识别和分类各种道路场景和对象是核心环节。使用Matlab的深度学习工具箱,可以创建和设计基于卷积神经网络(CNN)的网络架构。例如,通过SegNet网络架构进行像素级的分类和分割,这对于理解道路的结构和环境布局至关重要。Matlab提供了多种网络层和块,通过组合这些块可以构建满足特定需求的深度学习网络模型。
基于Simulink和Matlab的自动驾驶开发是一个涉及多种技术和工具的综合过程。通过上述介绍的知识点,可以看出Matlab和Simulink为自动驾驶开发提供了全面的工具和支持,涵盖了从数据处理、深度学习、网络设计、仿真到验证的整个开发流程。这对于初次开发者来说,无疑是一个宝贵的资源和参考。










评论0
最新资源