立体视觉算法计算机视觉
计算机视觉是一种使用计算机来模拟人类视觉的技术,立体视觉算法是计算机视觉中的一种重要技术。立体视觉算法的主要任务是从两个或多个图像中恢复三维场景的信息。这种技术有许多实际应用,如机器人视觉、计算机辅助外科手术、自动驾驶等。
立体视觉算法可以分为两个主要步骤:特征匹配和视差计算。特征匹配是指从两个图像中找到对应的特征点,而视差计算是指通过特征匹配结果来计算深度信息。
在特征匹配步骤中,需要使用一种度量来评估两个特征点之间的相似度。常用的度量方法有 SSD(Sum of Squared Differences)和 NCC(Normalized Cross-Correlation)。SSD 方法计算两个图像块之间的平方差,而 NCC 方法计算两个图像块之间的归一化互相关度量。
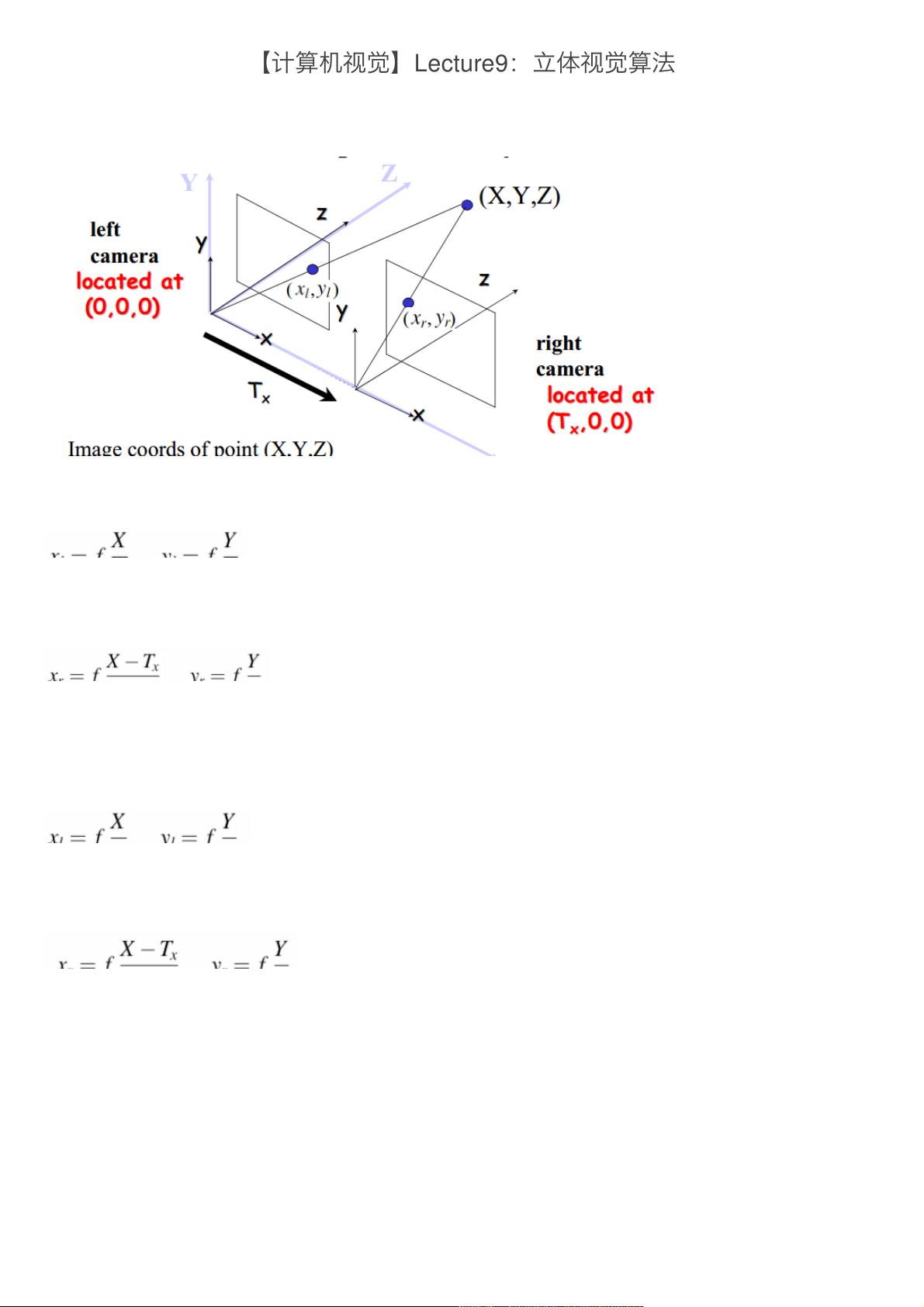
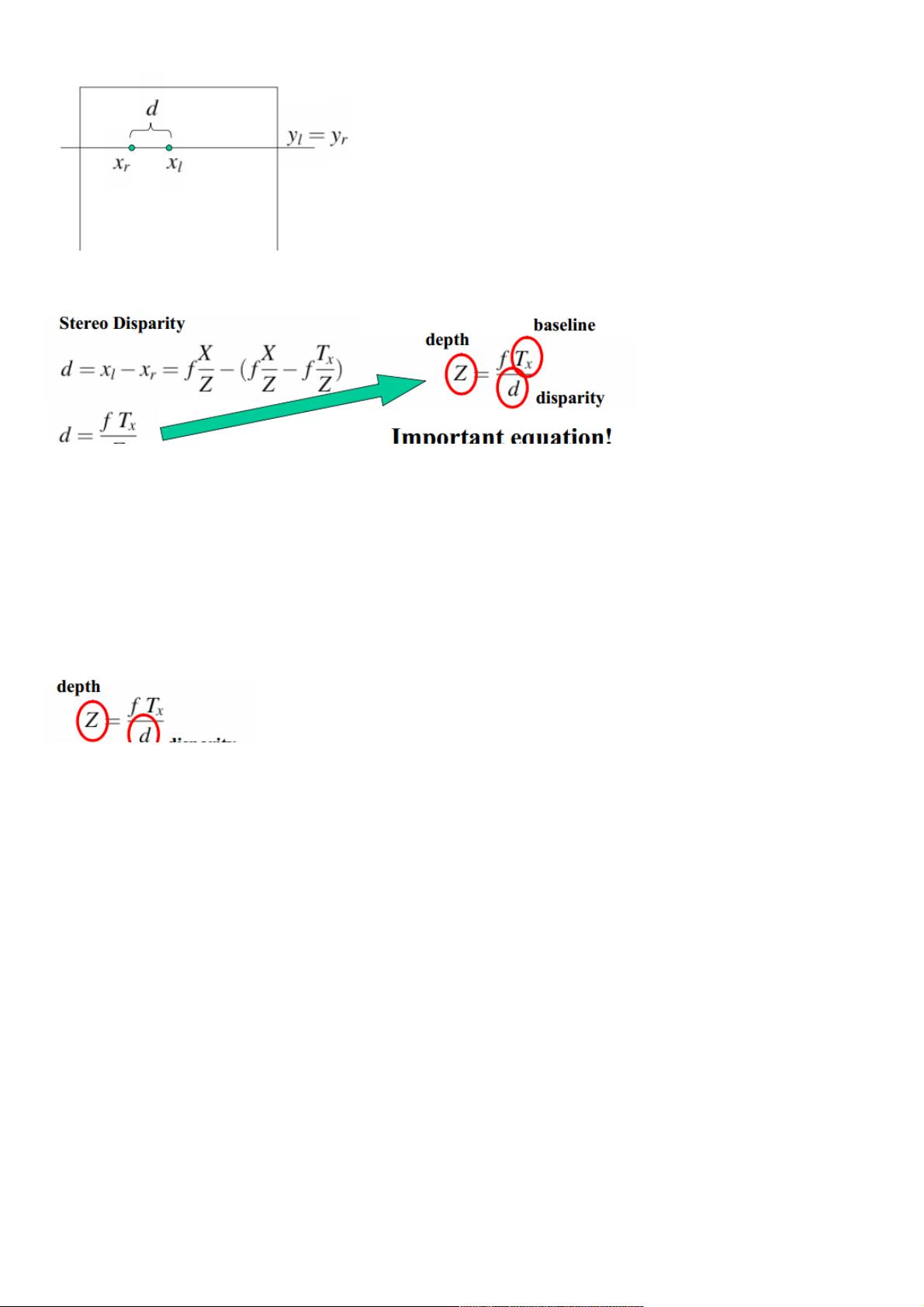
视差计算是指通过特征匹配结果来计算深度信息。深度信息是指图像中每个点的三维坐标。视差计算可以使用极线约束(Epipolar Constraint)来减少搜索空间。极线约束是指在右图像中找到左图像中的对应点时,搜索空间可以缩小到一维直线上。
本文中还介绍了视差空间图(DSI)的概念。DSI 是一种表达左图像和右图像中沿某一行的图像块之间的成对匹配分数的矩阵。DSI 可以用来描述视差计算的结果,並且可以用来处理遮挡问题。
遮挡问题是指在图像中有一些区域无法被正确匹配的现象。为了处理遮挡问题,可以使用遮挡填充(Occlusion Filling)技术。遮挡填充是指使用邻近有效像素的值来填充遮挡像素的方法。
本文还介绍了 Dynamic Programming(DP)算法的应用于立体视觉算法中。DP 算法可以用来解决视差计算问题,並且可以处理遮挡问题。
本文介绍了立体视觉算法的基本概念和技术,包括特征匹配、视差计算、视差空间图和Dynamic Programming算法的应用。这些技术都是计算机视觉中的重要组成部分,并且有许多实际应用。














评论0