
## 环境
## bringup原始功能的说明
### 节点构建
#### 各个节点的解释
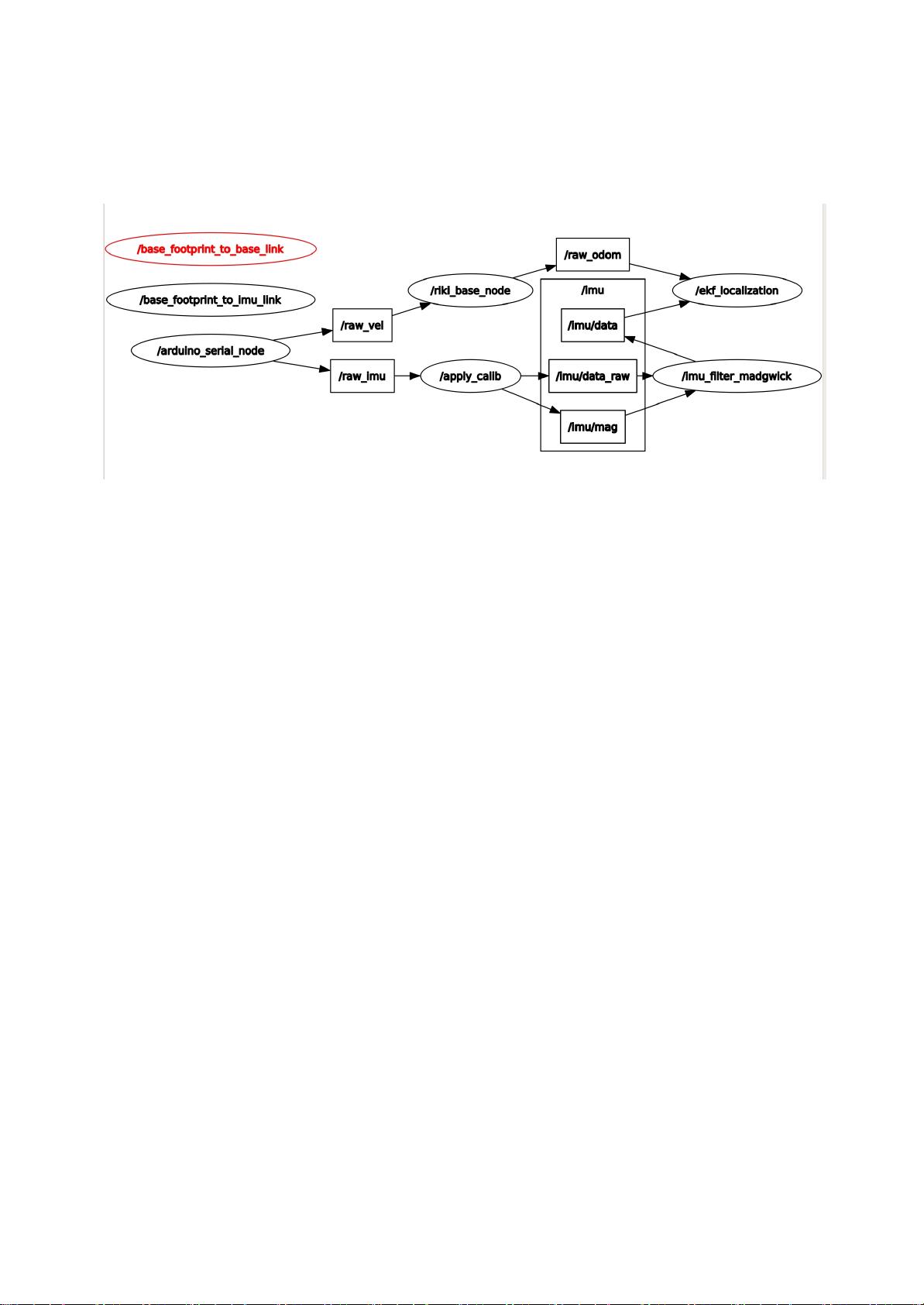
节点:/arduino_serial_node
功能:从串口接收IMU数据并发送出去
发布:/raw_imu imu的原始数据包括角速度、加速度、磁场。
/raw_vel 线速度值和一个角度值
节点:apply_calib;
功能:对IMU数据进行初步处理
接收:/raw_imu
发布:/imu/mag
/imu/data_raw :关于位姿的数据包,包括方向、加速度、角速度等值。
节点:imu_filter_madgwick
功能:融合imu和磁场值,获得一个imu数据
接收:/imu/mag
/imu/data_raw
发布:/imu/data
节点:riki_base_node

剩余10页未读,继续阅读
资源评论


USTC看门老大爷
- 粉丝: 20
- 资源: 1









最新资源
- 形状检测32-YOLO(v5至v9)、COCO、CreateML、Darknet、Paligemma数据集合集.rar
- qwewq23132131231
- 2024年智算云市场发展与生态分析报告
- 冒泡排序算法解析及优化.md
- MySQL中的数据库管理语句-ALTER USER.pdf
- 论文复现:结合 CNN 和 LSTM 的滚动轴承剩余使用寿命预测方法
- 2018年最新 ECshop母婴用品商城新版系统(微商城+微分销+微信支付)
- 形状分类31-YOLO(v5至v11)、COCO、CreateML、Darknet、Paligemma、VOC数据集合集.rar
- 常见排序算法概述及其性能比较
- 前端开发中的JS快速排序算法原理及实现方法
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


