
智能小车介绍
•
智能小车是一种能够通过编程手段完成特定任务的小型化机器
人 , 它具 有制作成本低廉 , 电路结构简单 , 程序调试方便等优
点 . 由于具有很强的趣味性 , 智能小车深受广大机器人爱好者以
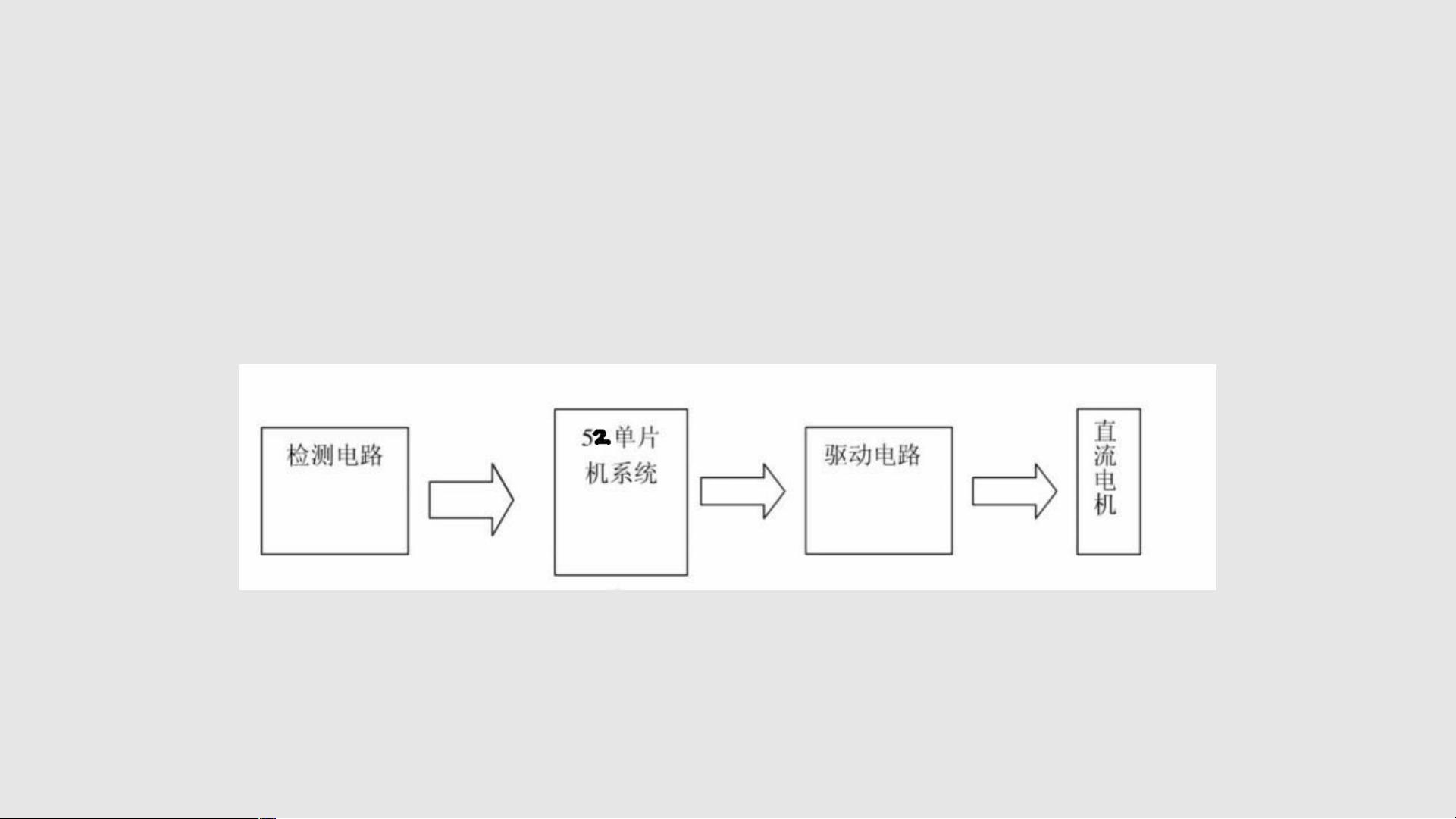
及高校学生的喜爱 . 本论文介绍的是具有自动避障功能的智能
小车的设计与制作 ( 以下简称 智能小车 ) , 论文对智能小车的
方案选择 , 设计思路 , 以及软硬件的功能和工作原理进行了详细
的分析和论述 . 经实践验收测试 , 该智能小车的电路结构简单 ,
调试方便 , 系统反映快速 , 灵活 , 设计方案正确 , 可行 , 各项指
标 稳定 , 可靠 .
第 1 页 / 共 14 页

剩余13页未读,继续阅读
资源评论


加油学习加油进步
- 粉丝: 1401
- 资源: 52万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


